4.1.4创建变位机
本节介绍如何在RobAI软件中创建变位机装置。变位机是用于翻转或旋转工件的辅助设备,通过创建变位机装置,用户可以在仿真环境中模拟机器人与变位机的协同工作,实现复杂焊缝的自动化焊接。
导入基座模型
点击顶部菜单栏“附件”,选择“导入”,弹出文件选择窗口。
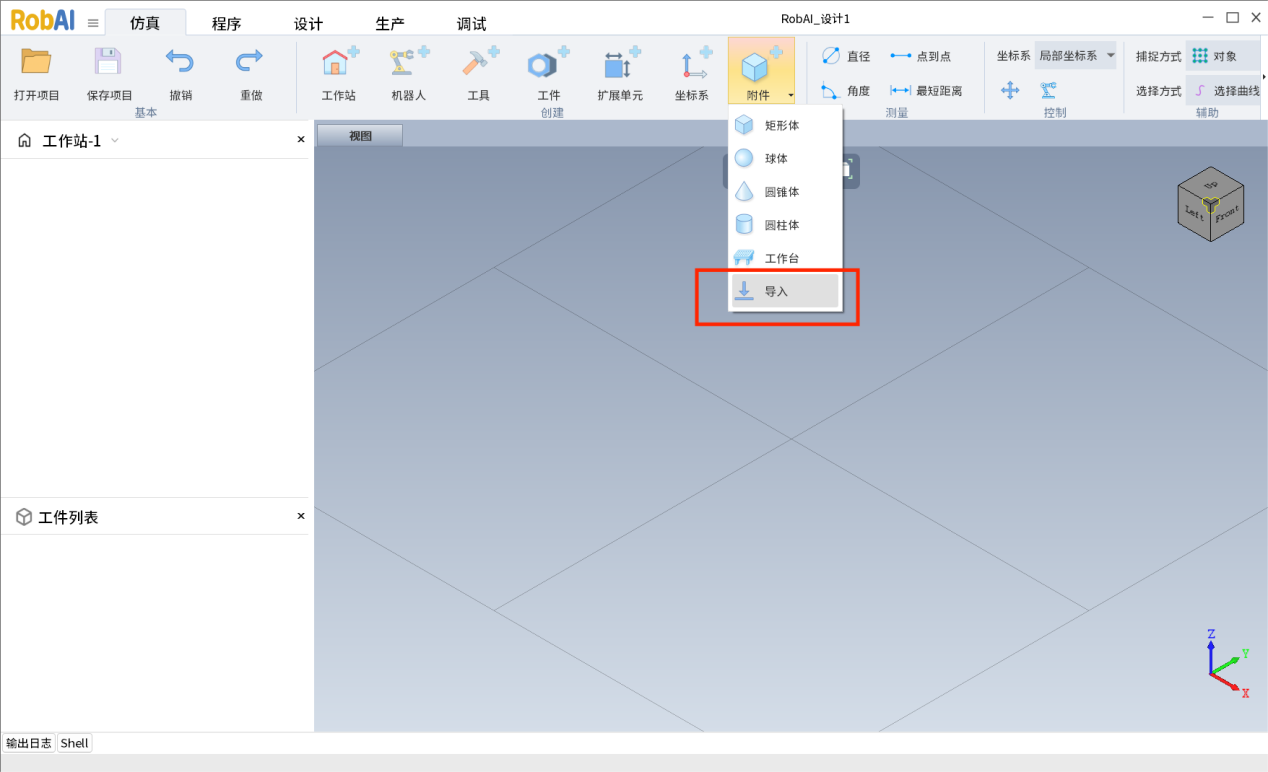
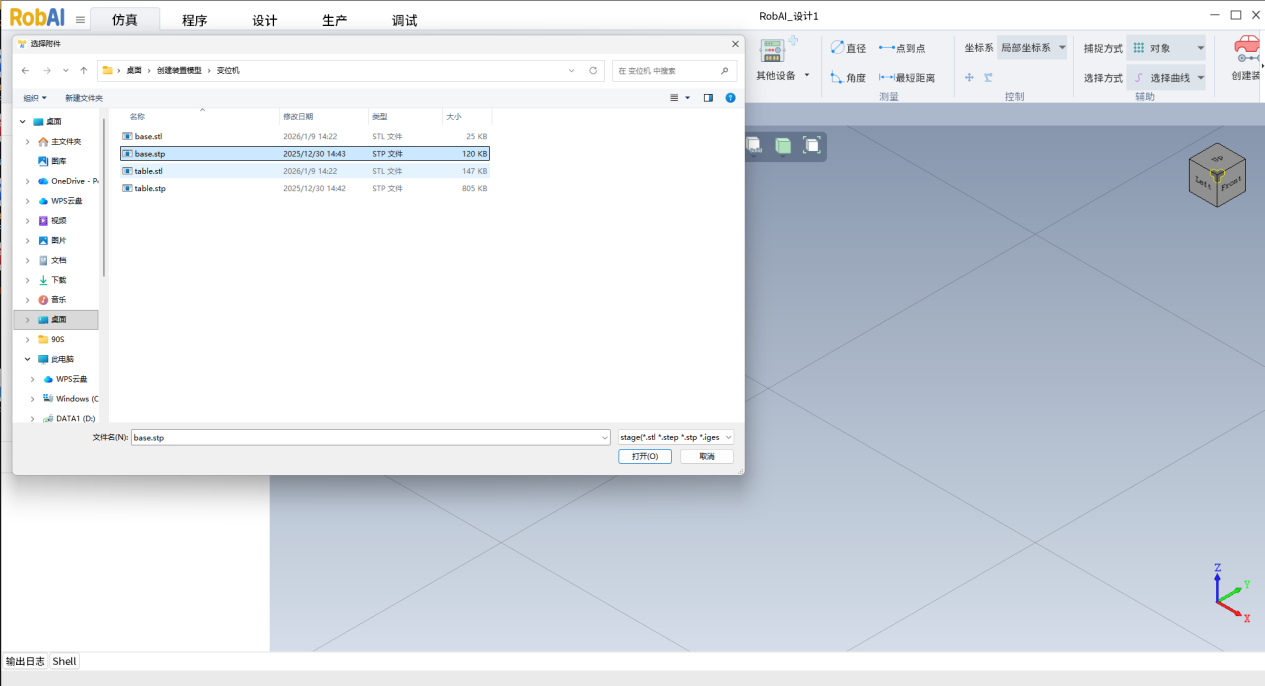
选择变位机基座模型文件(支持.stp格式),点击"打开"导入基座模型。
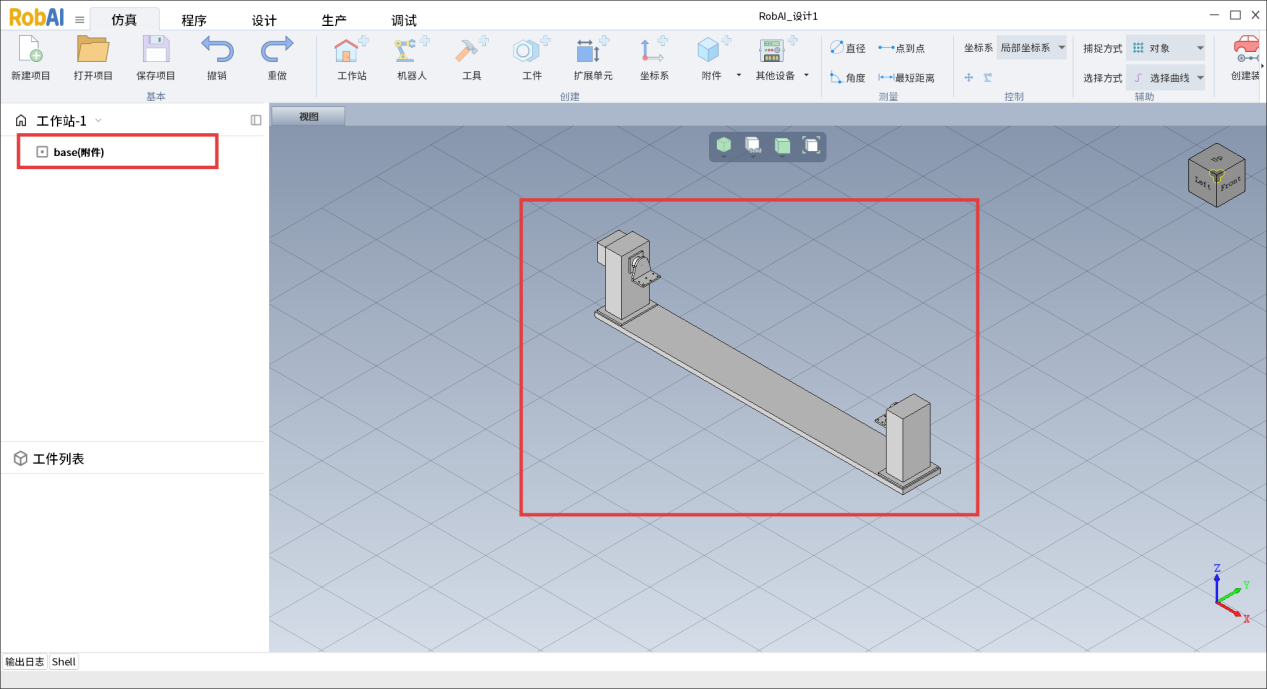
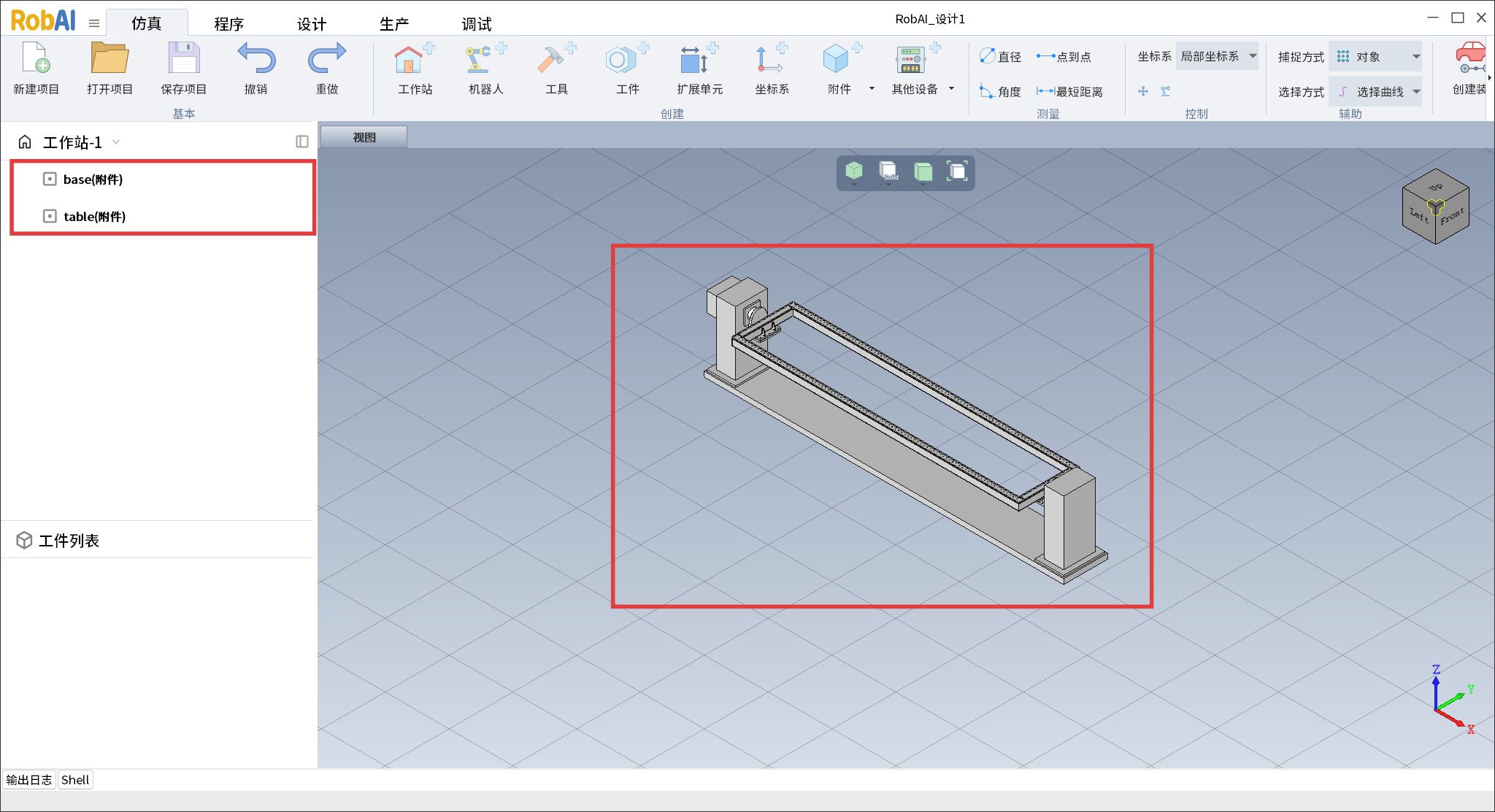
导入成功后,基座模型显示在图形视窗中,左侧设备树中出现“base(附件)”项。
添加旋转工作台模型
继续点击顶部菜单栏“附件”,选择“导入”,导入旋转工作台模型文件(table.stp)。
导入完成后,设备树中显示完整的变位机结构:base(基座)和table(旋转工作台)。
创建机械装置
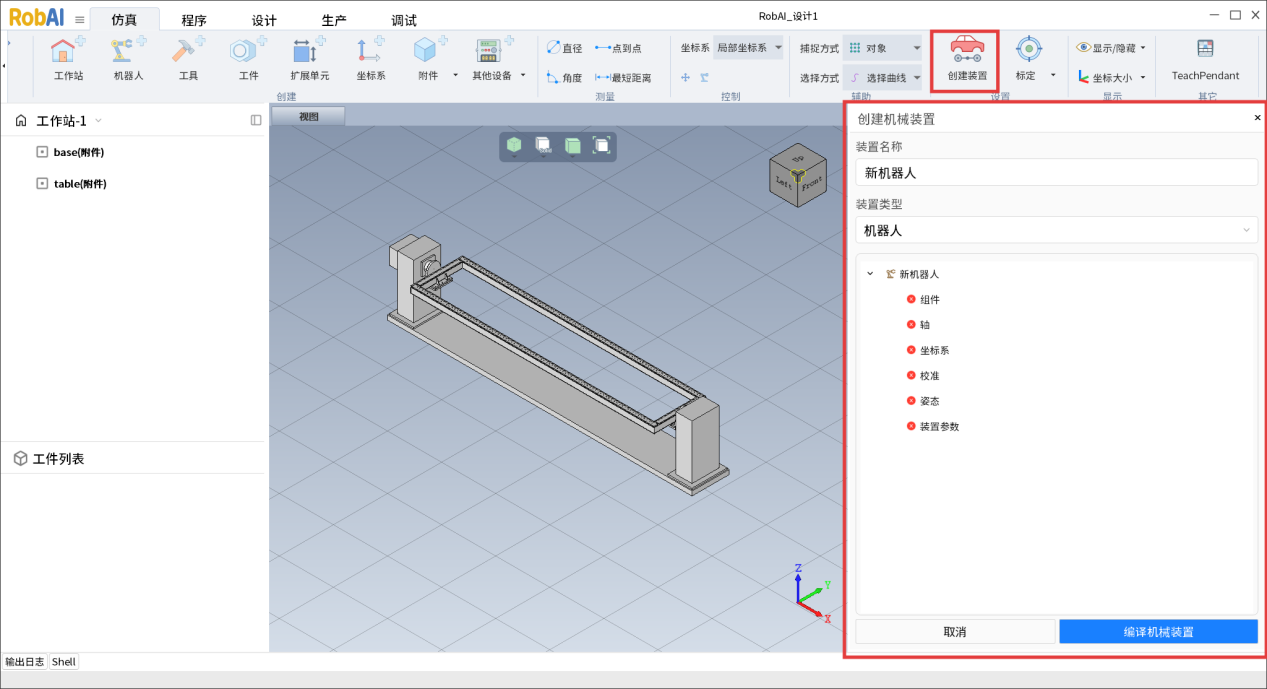
点击菜单栏中的"创建装置"按钮,弹出"创建机械装置"面板。
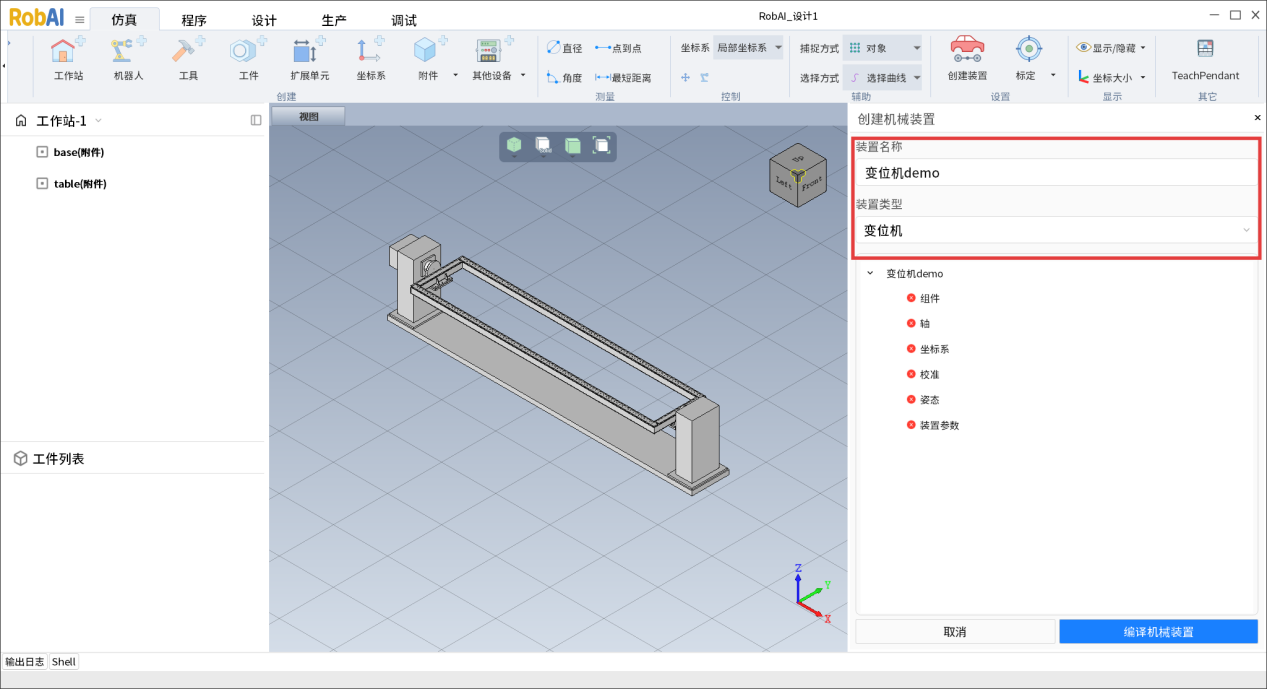
设置名称类型
·装置名称:输入名称,如"变位机demo"
·装置类型:选择"变位机"
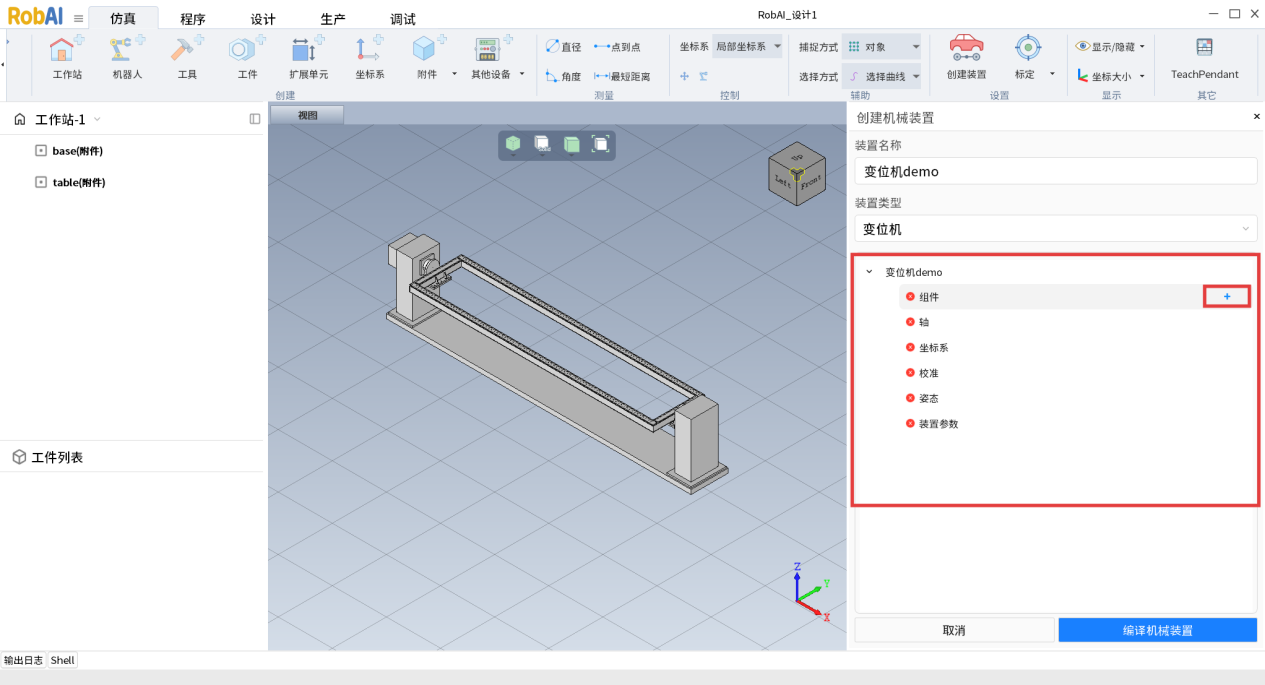
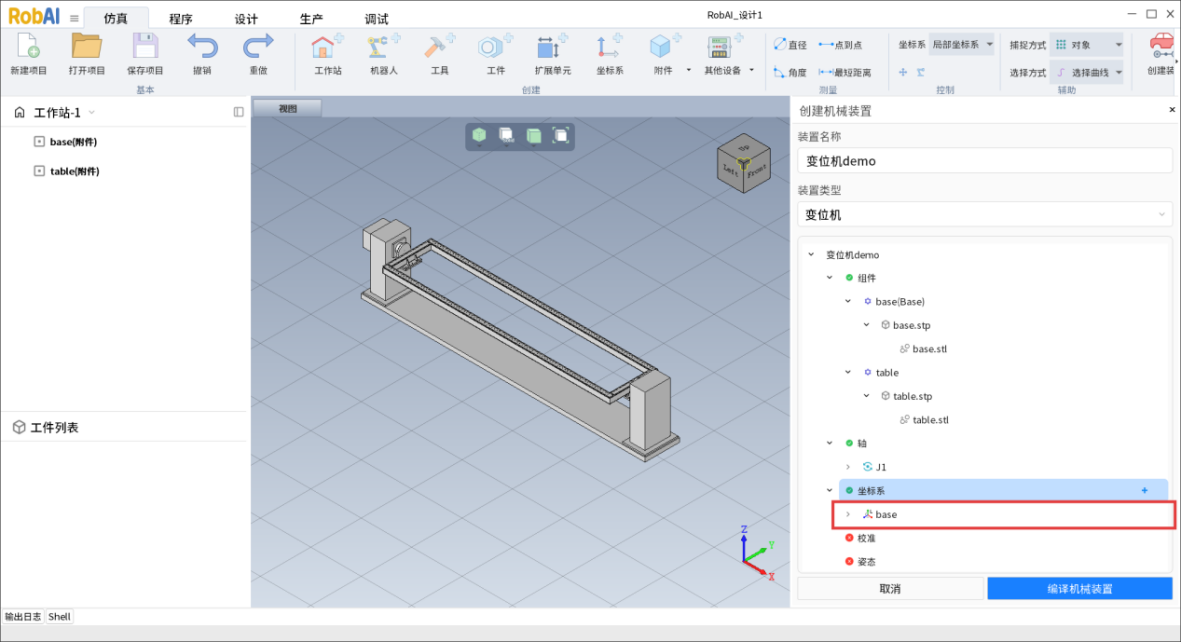
添加组件
点击"添加组件"按钮,将base和table全部添加到装置结构中。
Base组件添加时需勾选“设置为基座”。

Table组件添加时无需勾选。
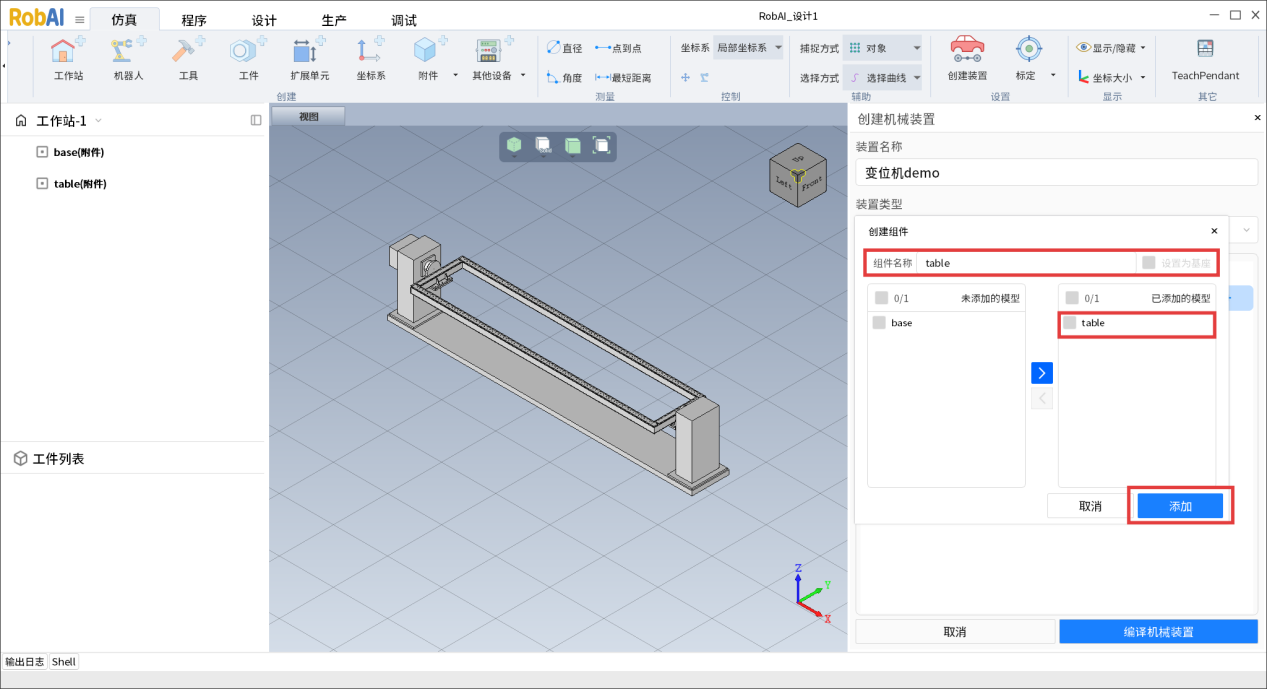
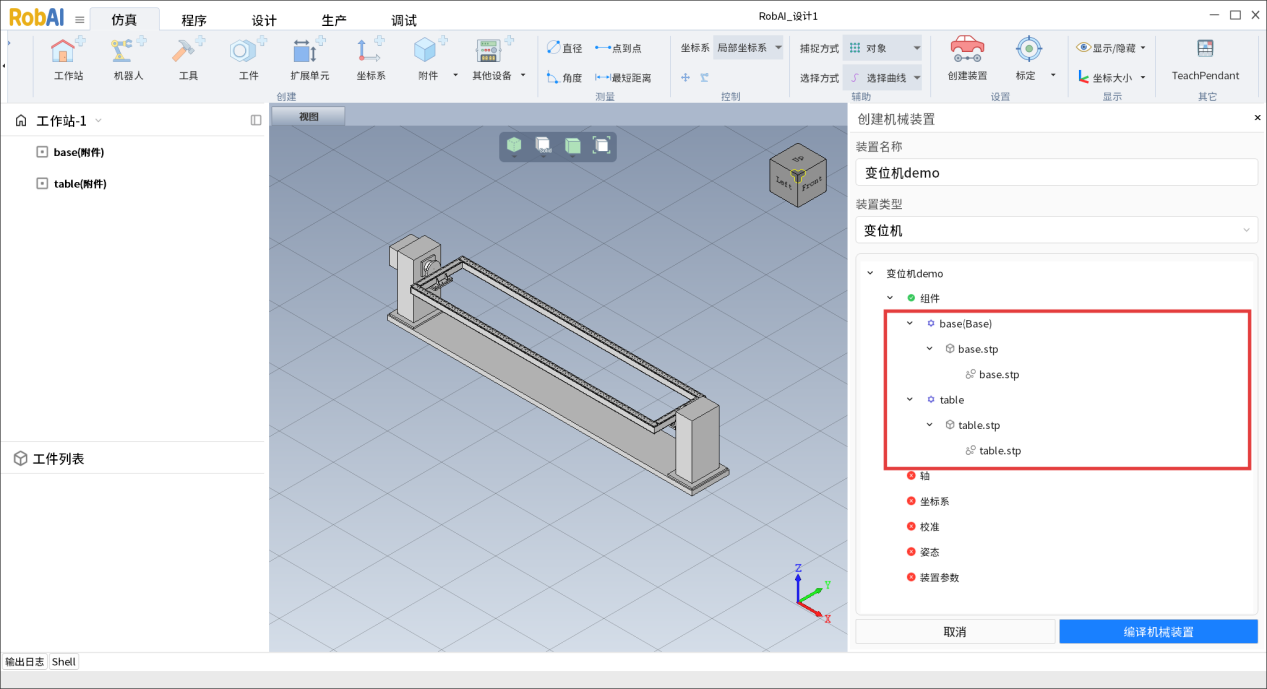
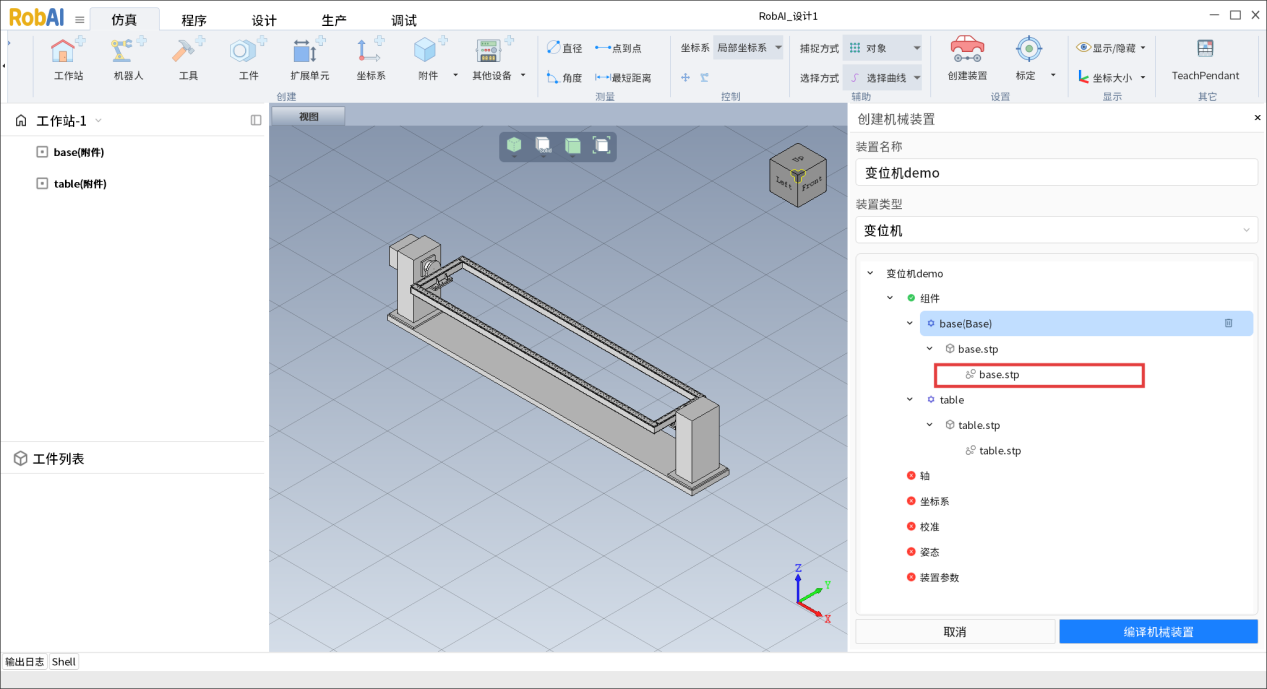
全部添加完成显示如下图
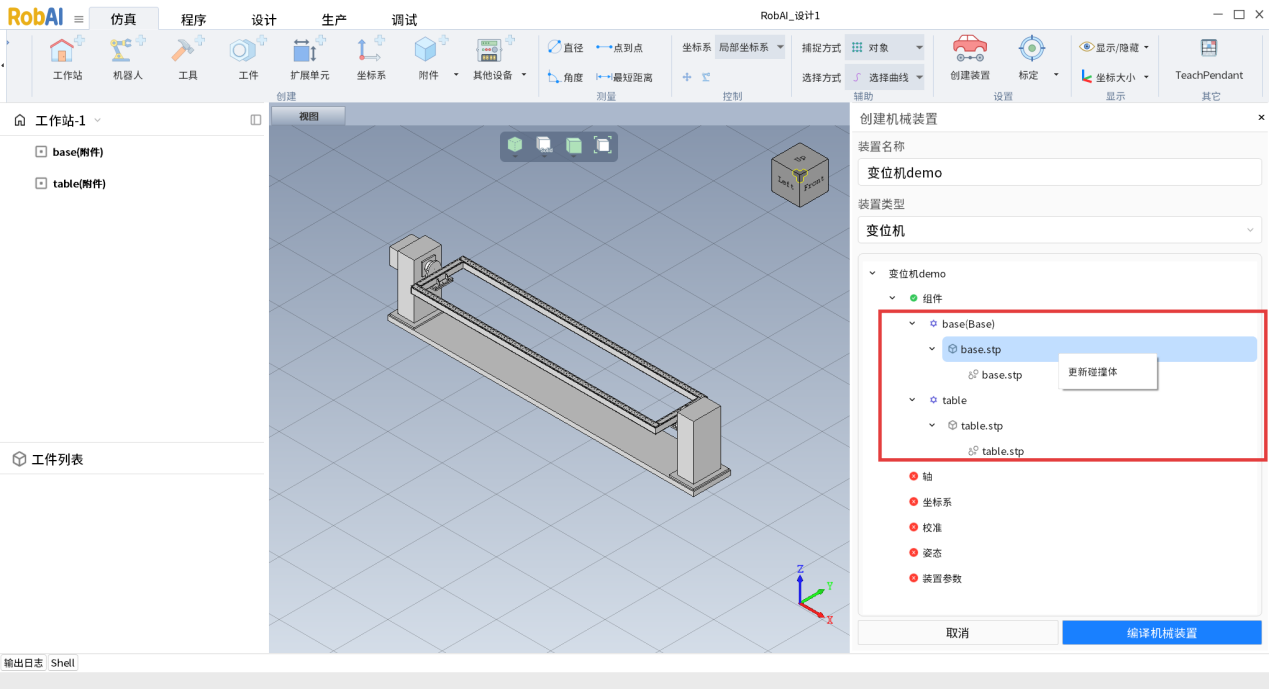
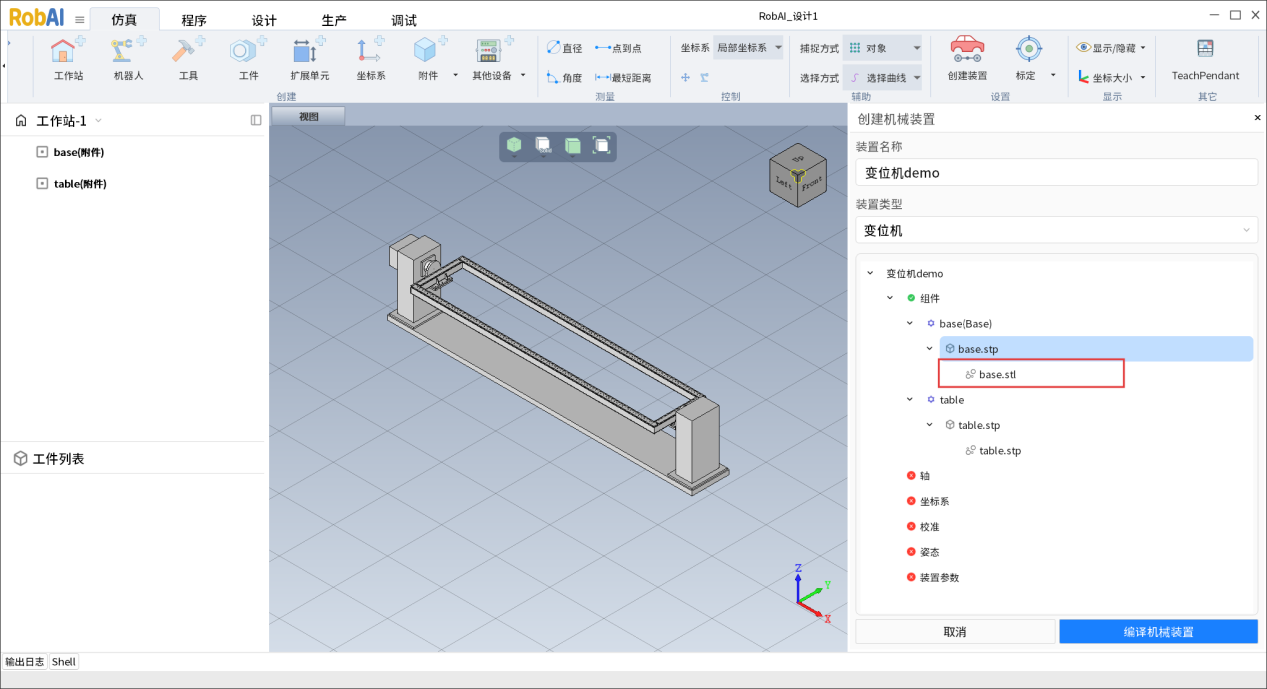
点击base.stp选择“更新碰撞体”。
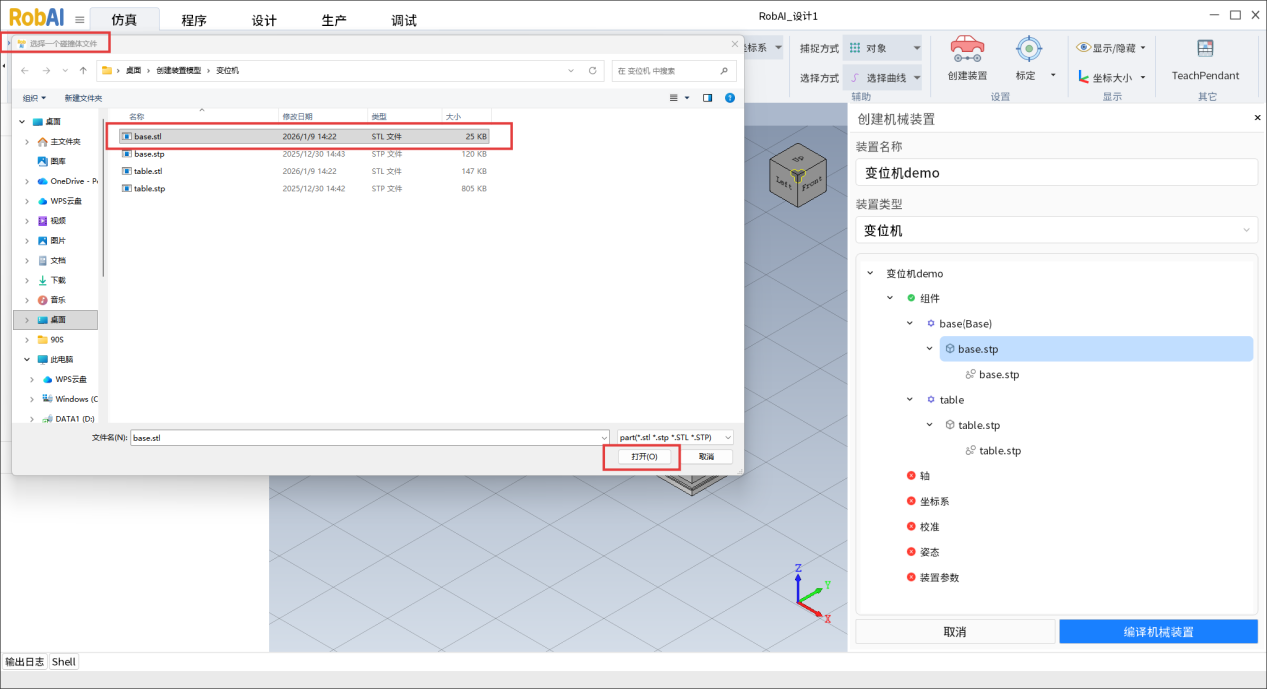
弹出文件框,选择碰撞体文件base.stl。
更新前:
更新后:
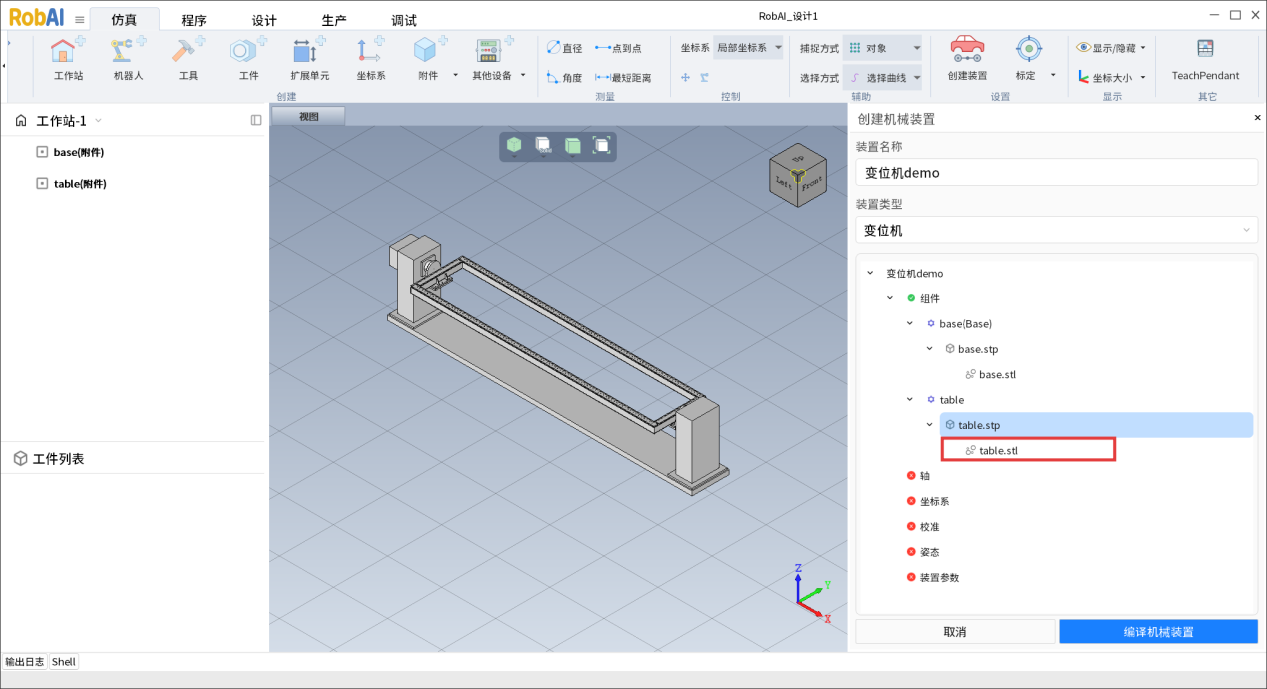
同理点击table.stp选择“更新碰撞体”,更新为table.stl。
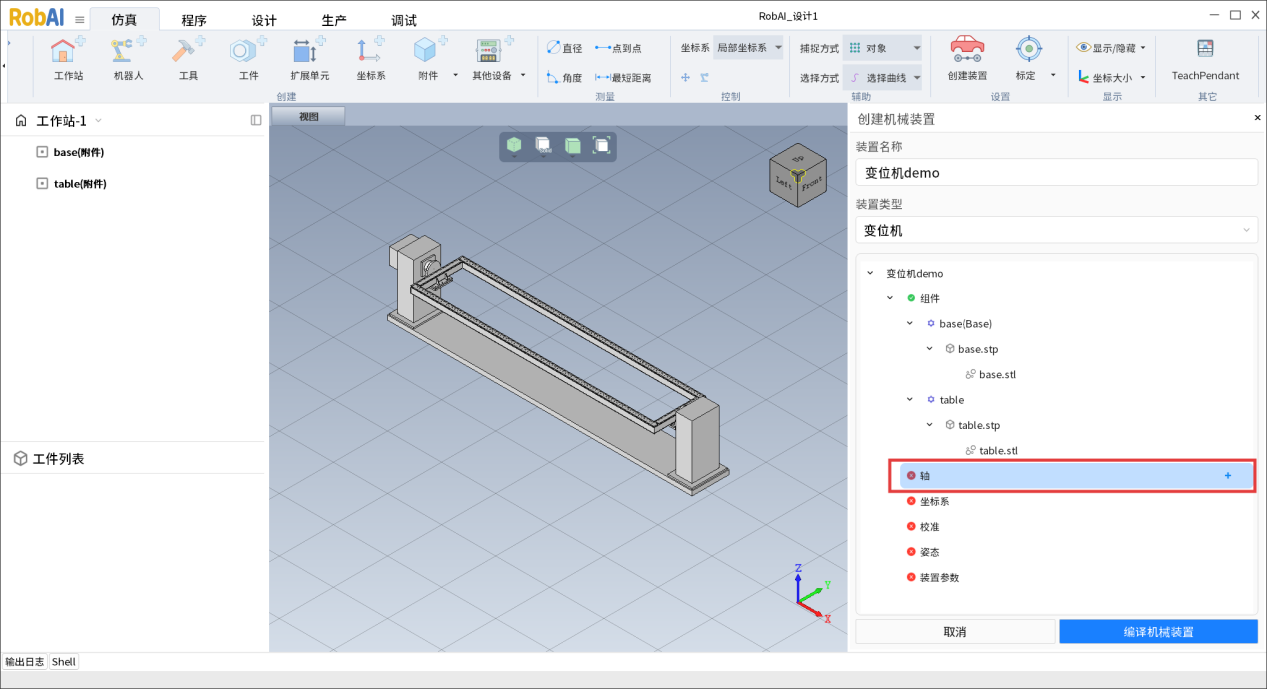
轴定义
点击“+”,弹出“轴定义”面板。
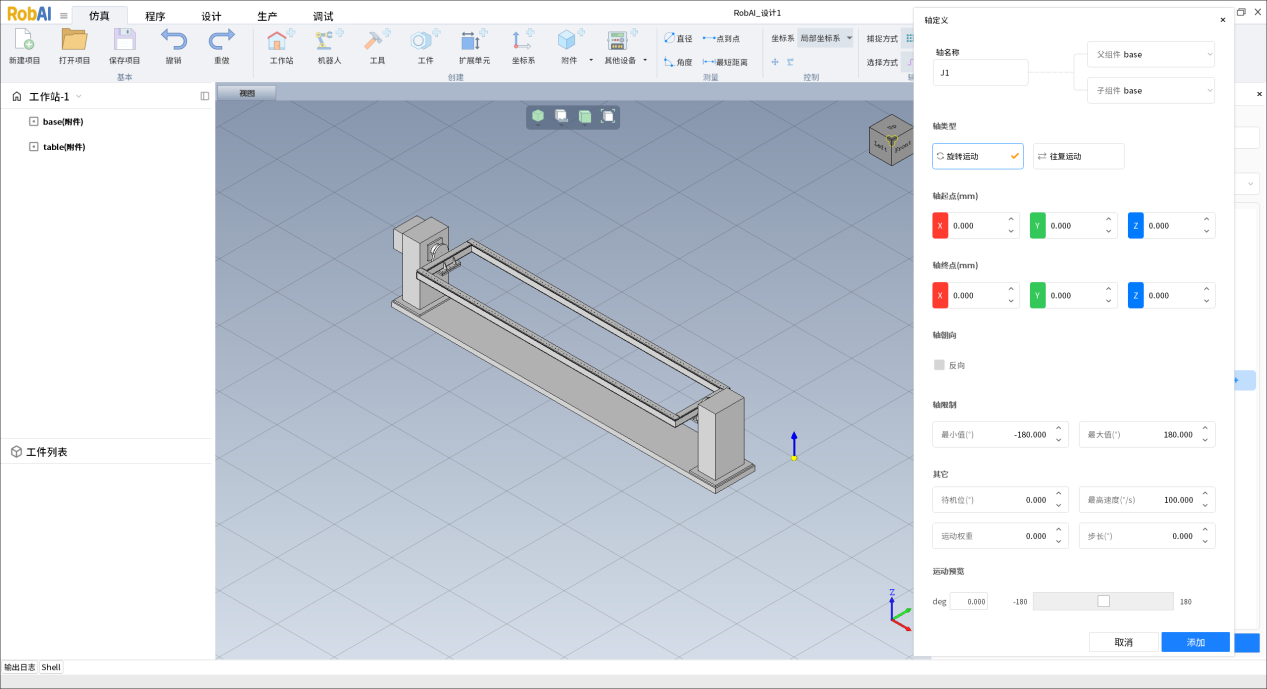
参数说明:
·轴名称:当前轴编号(如table等)
·父组件:该关节的上一级关节
·子组件:当前关节
·轴类型:
旋转运动:关节绕轴旋转
往复运动:关节沿轴直线移动
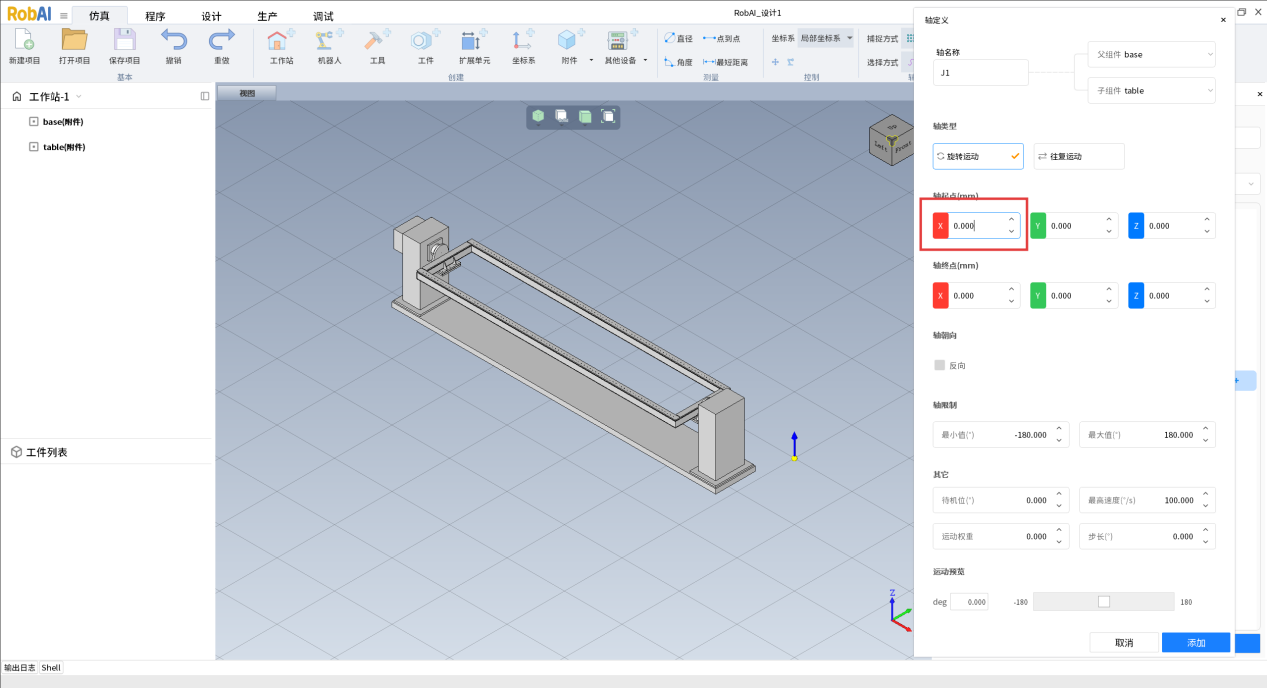
·轴起/终点:轴的起点和终点,由两个点确定轴在哪里以及轴向
·轴朝向:轴线指向方向,可反向
·轴限制:
最小值:关节运动的最小角度/距离
最大值:关节运动的最大角度/距离
轴限制的角度范围应根据实际变位机的旋转能力设置
·运动参数:步长、速度等设置
·运动预览:滑动模块图形视窗中出现模拟运动
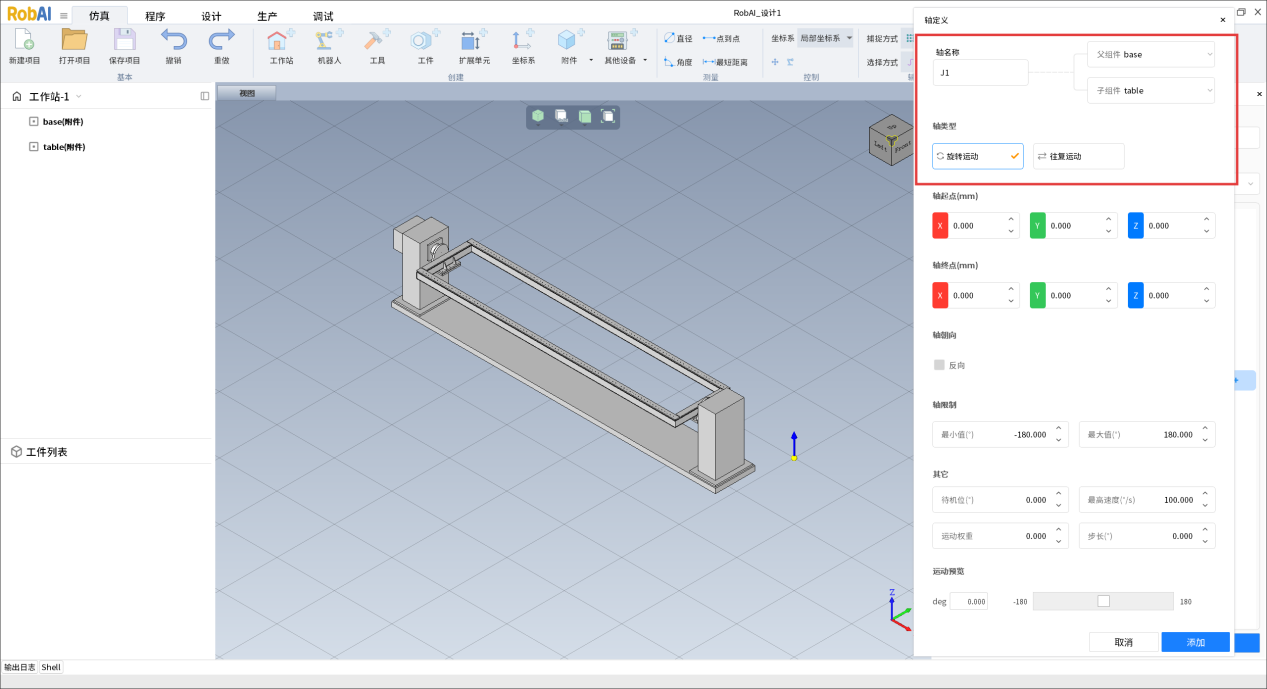
父组件为“base”,子组件为“table”。变位机轴类型应选择“旋转运动”。
鼠标先点一下参数输入框(如轴起点X),再在图形视窗中点击table,即生成轴线及其起终点。
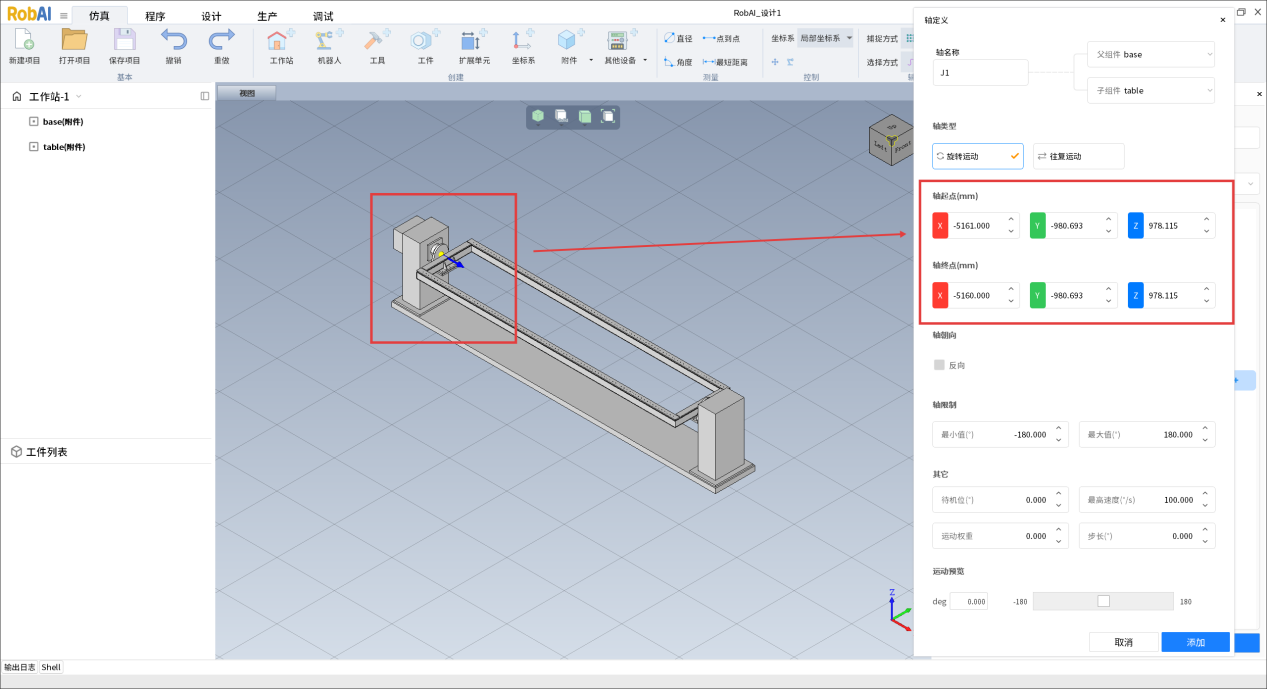
可按实际情况配置变位机的关节活动范围、最大速度等参数(目前就设置这两个就可以)。
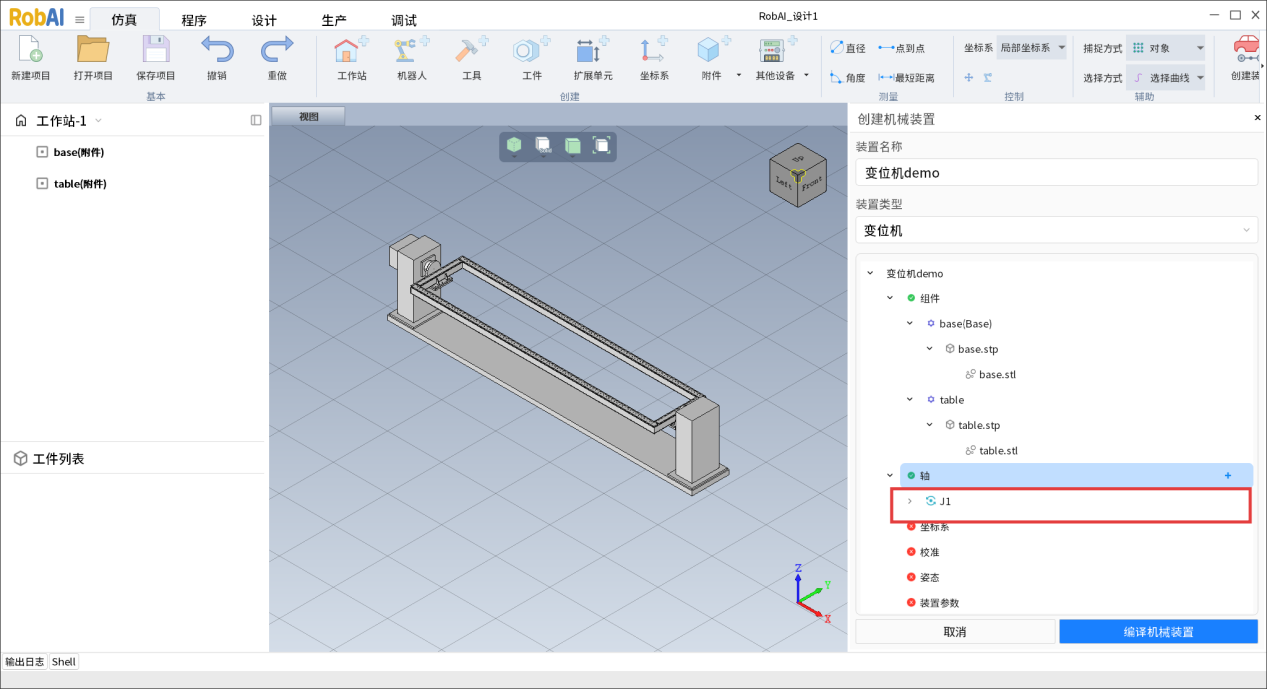
配置其他参数后点击添加。
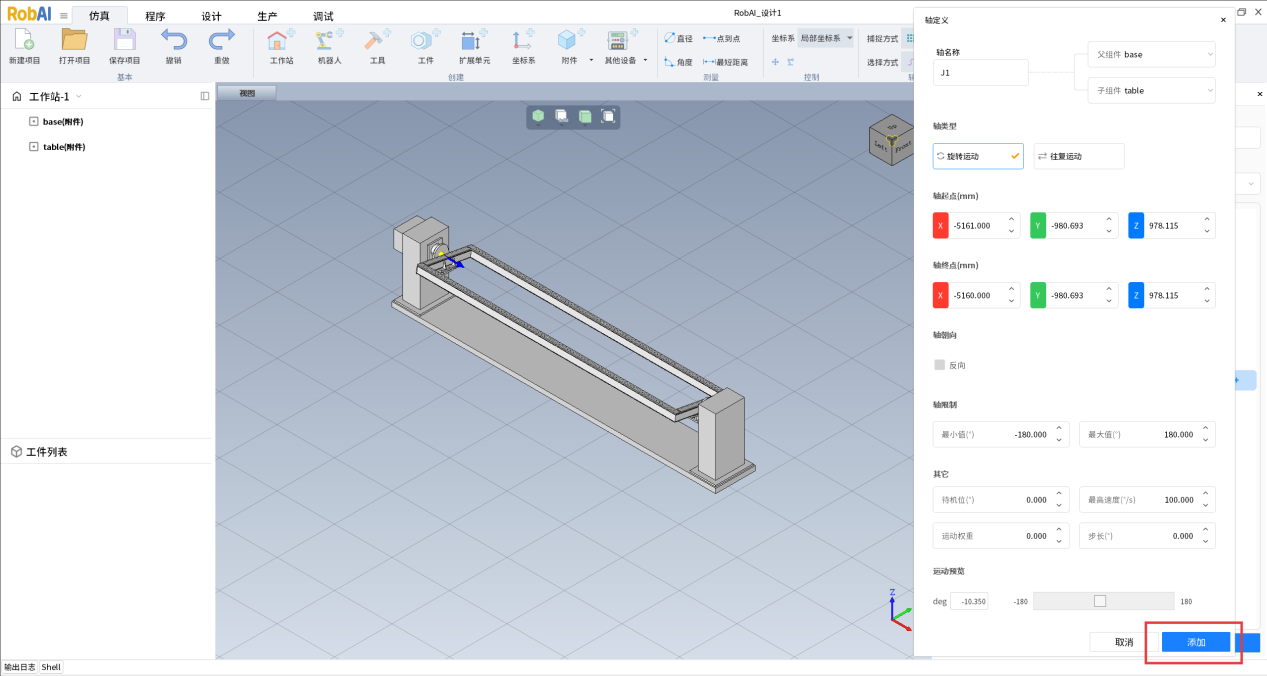
添加成功。
定义坐标系
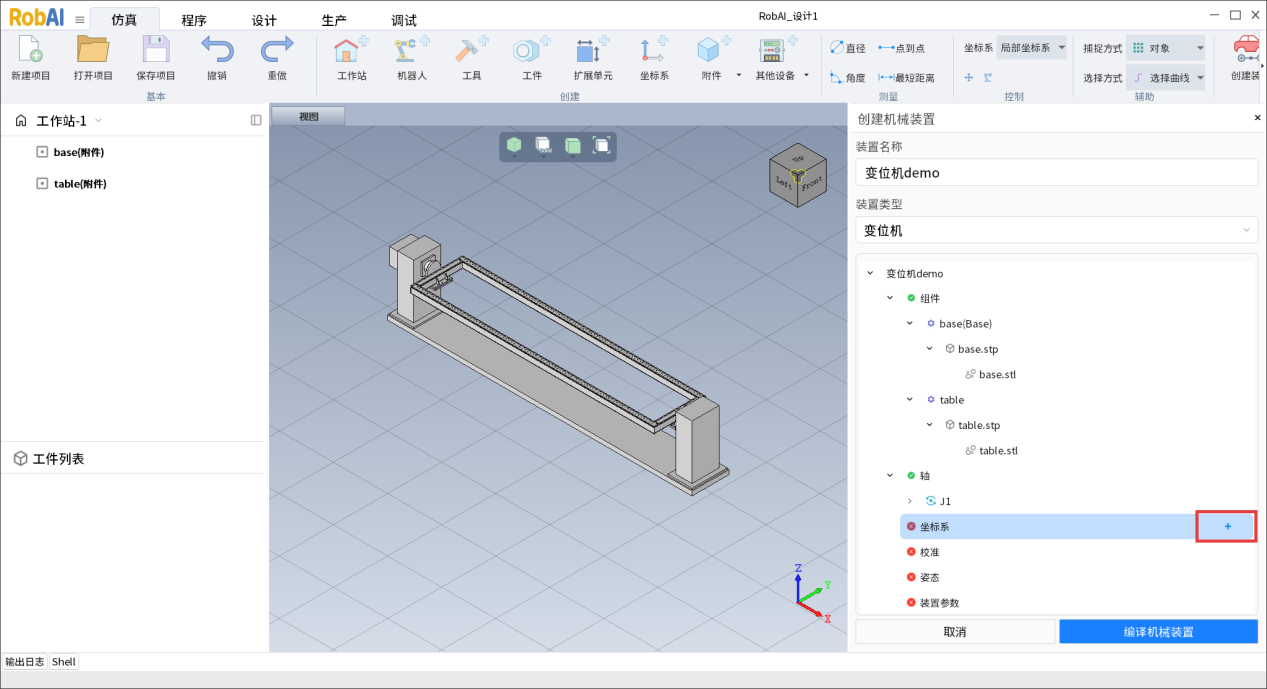
Base坐标系设置在基座上。
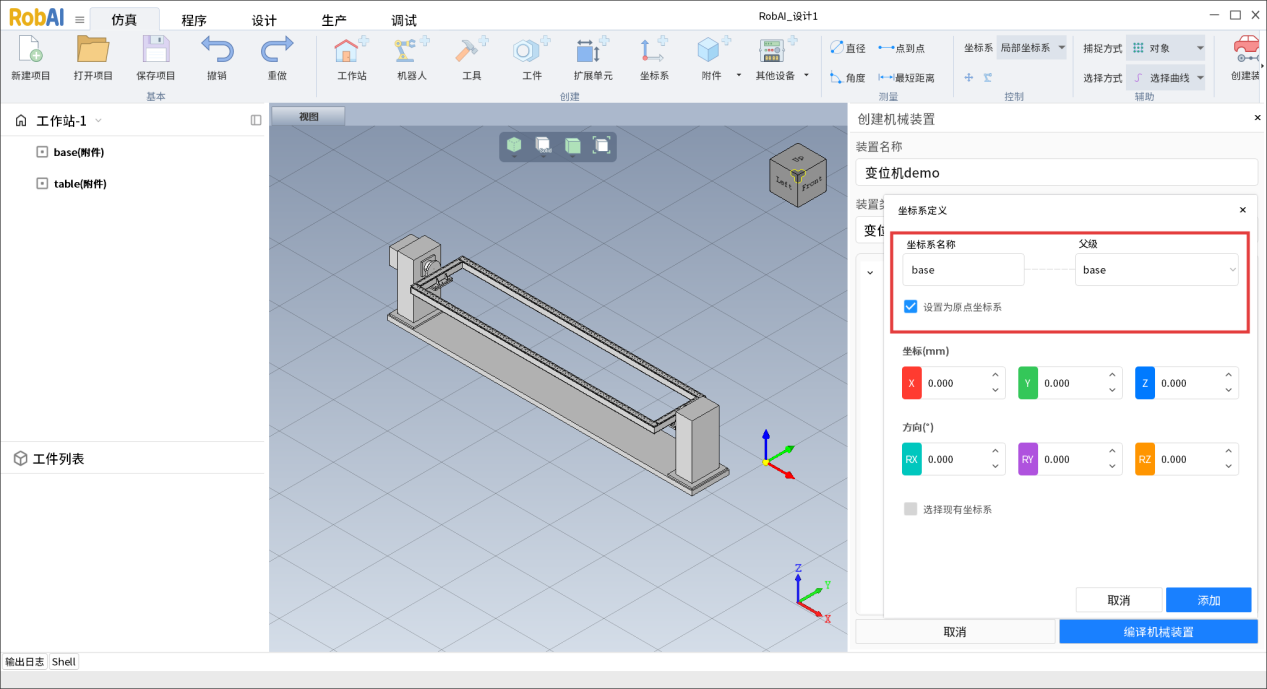
鼠标先点一下参数输入框(如轴起点X),然后在图像视窗中鼠标点击基座,自动生成base坐标系。可手动更改坐标系位置和方向。
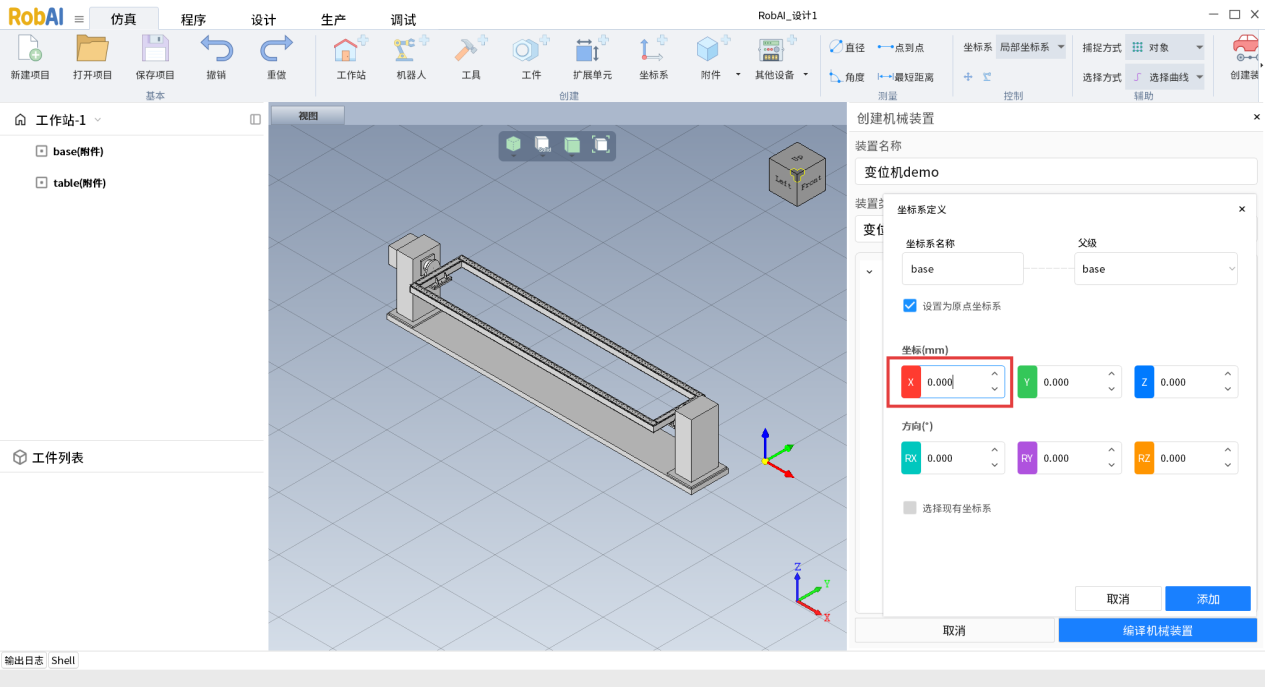
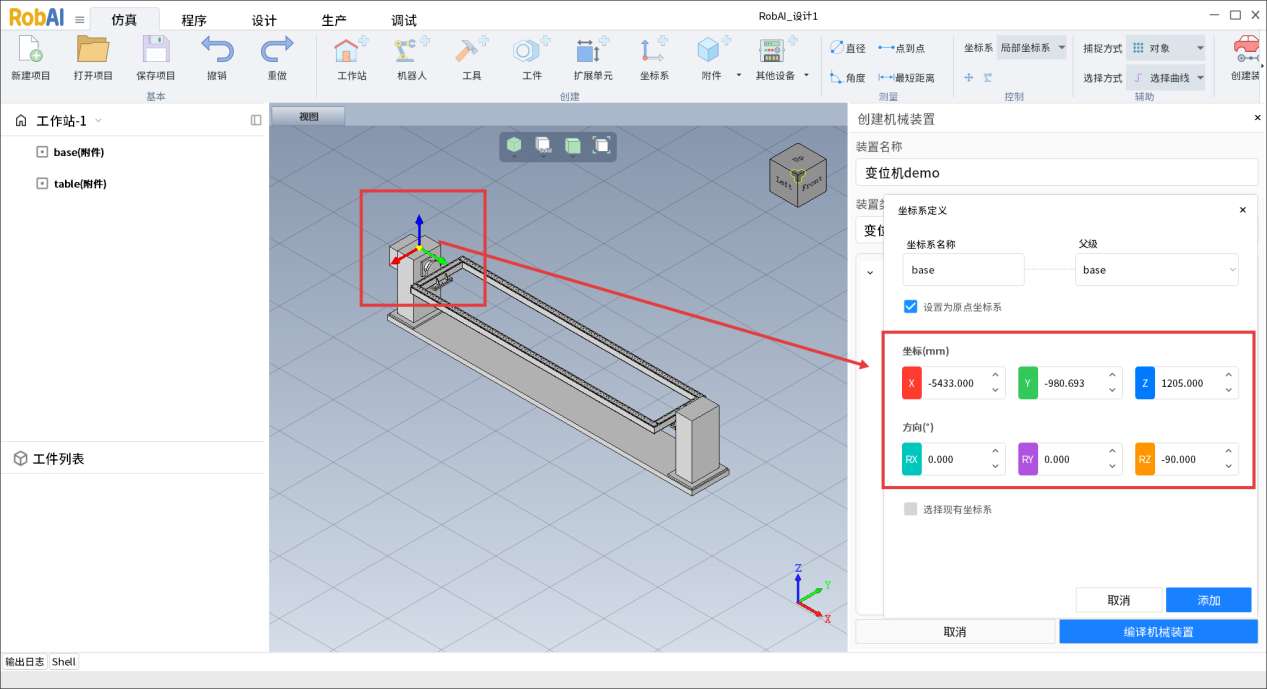
完成后点击「添加」按钮即可完成base坐标系添加。
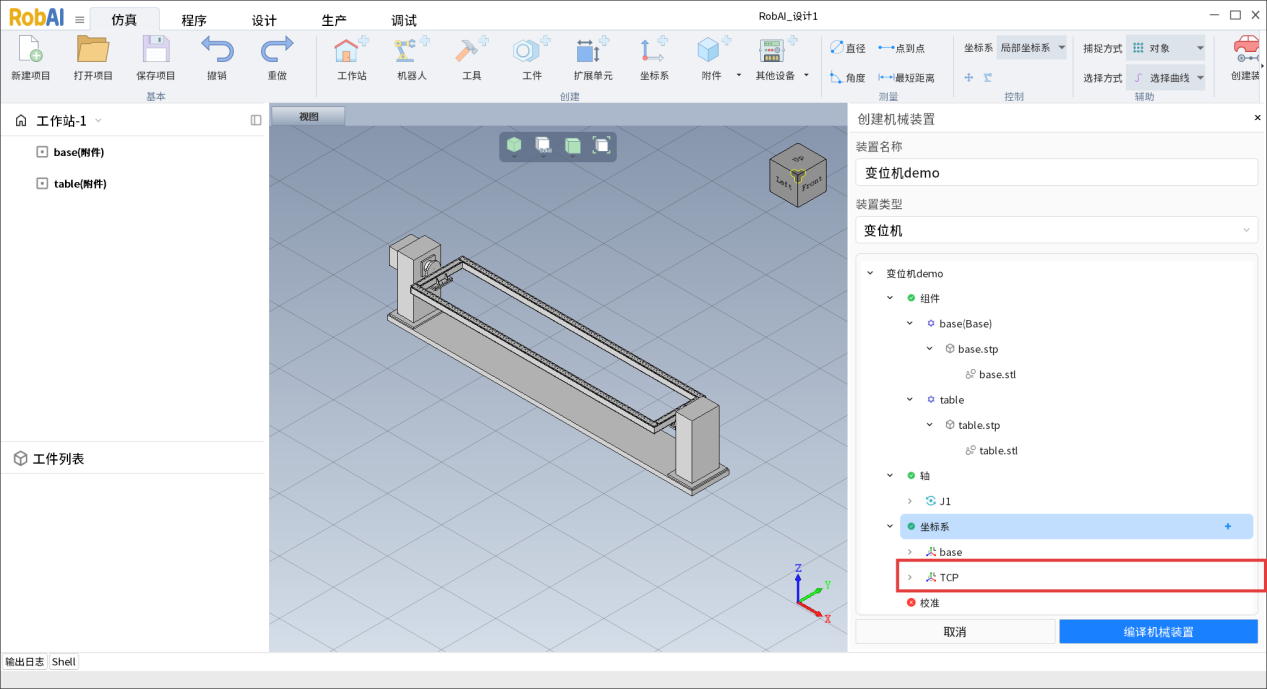
同理添加坐标系TCP,父级为table。先点击参数输入框再鼠标点击table。
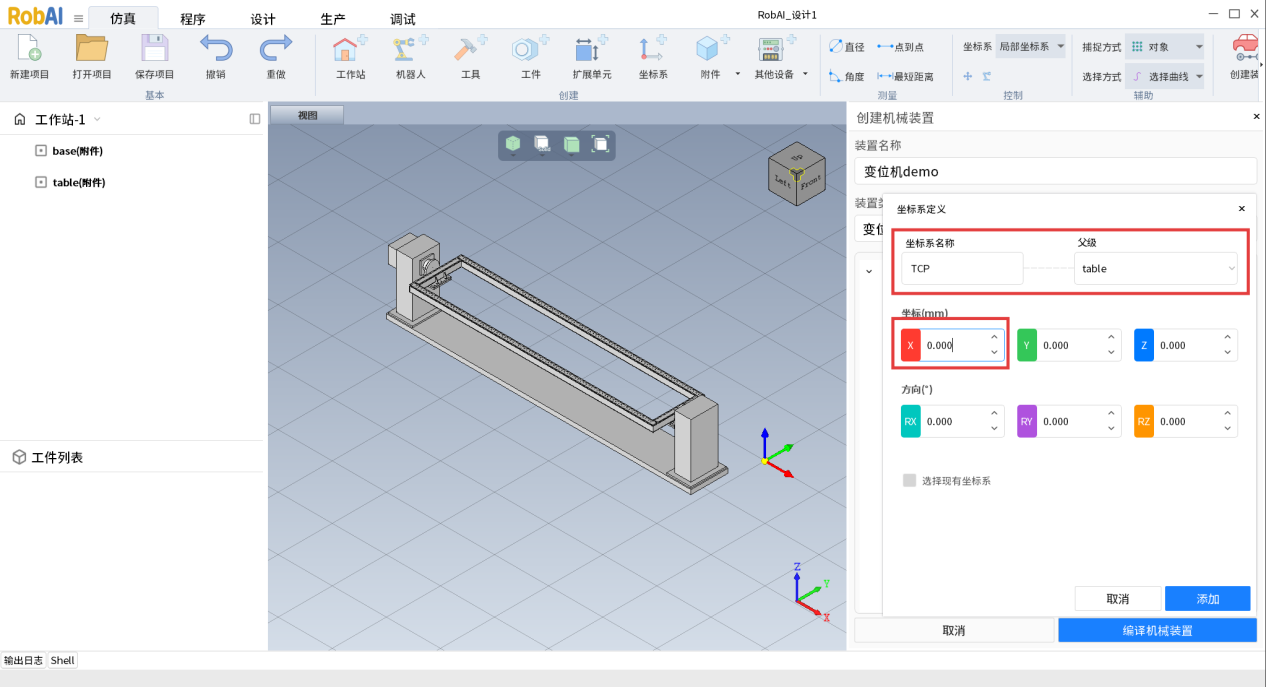
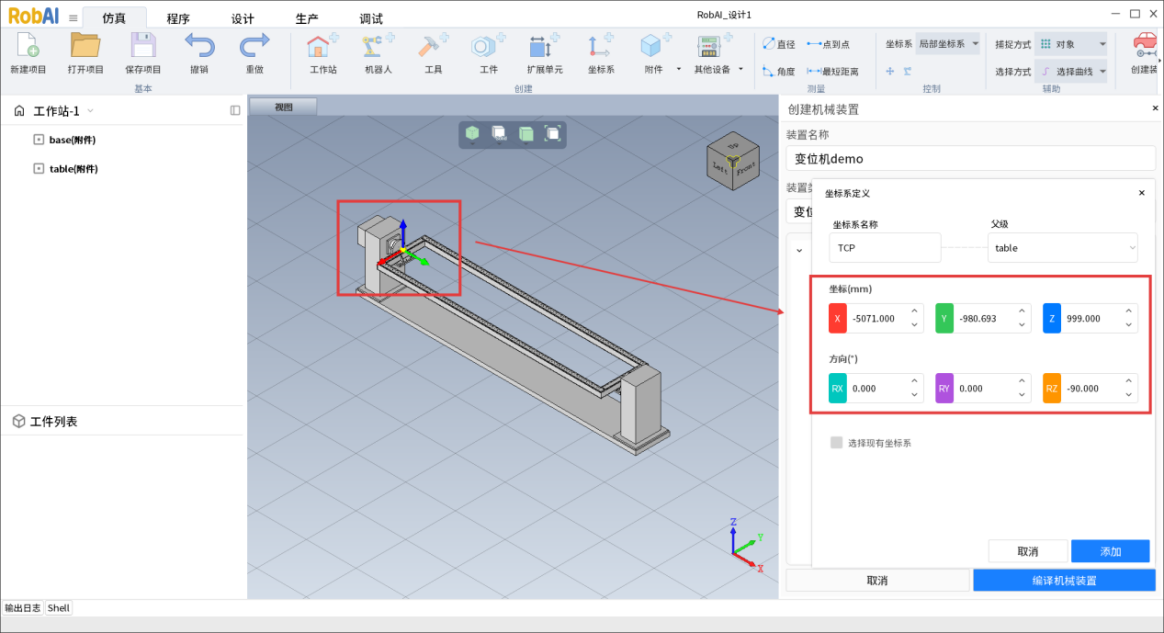
添加完成。
设置装置参数
点击“+”,弹出参数设置窗口。
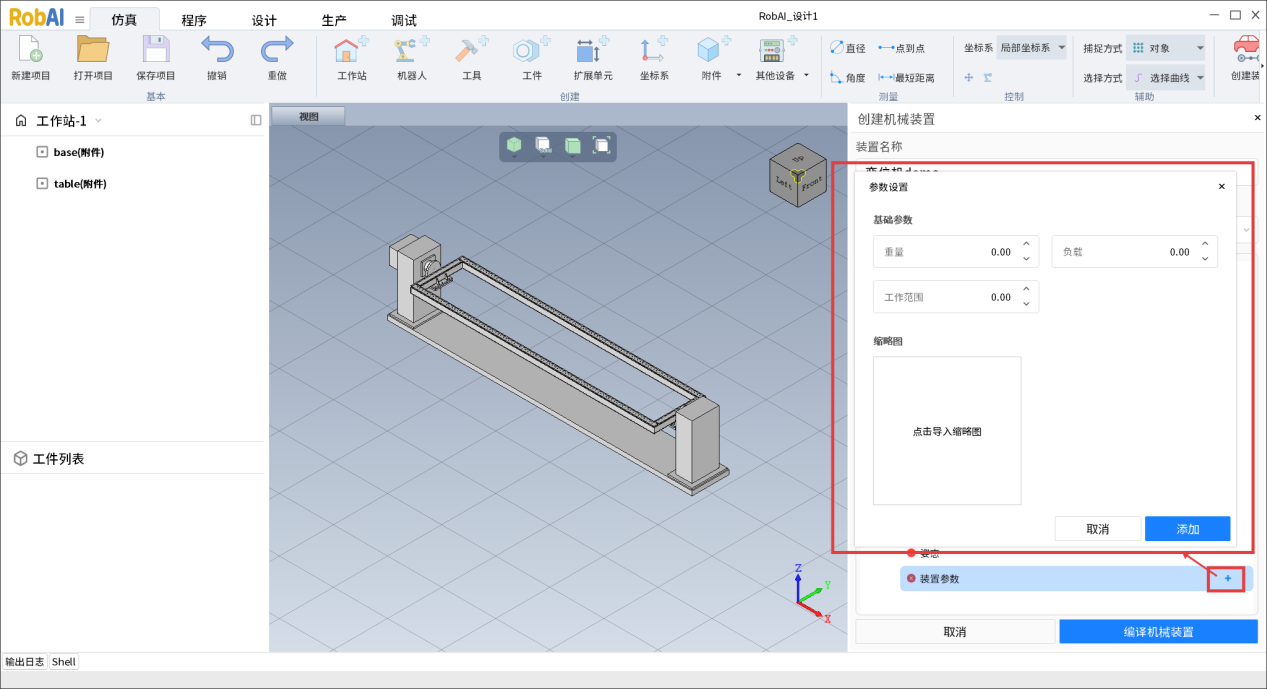
基础参数中设置:
·重量(单位:kg)
·负载(单位:kg)
·工作范围(单位:m)
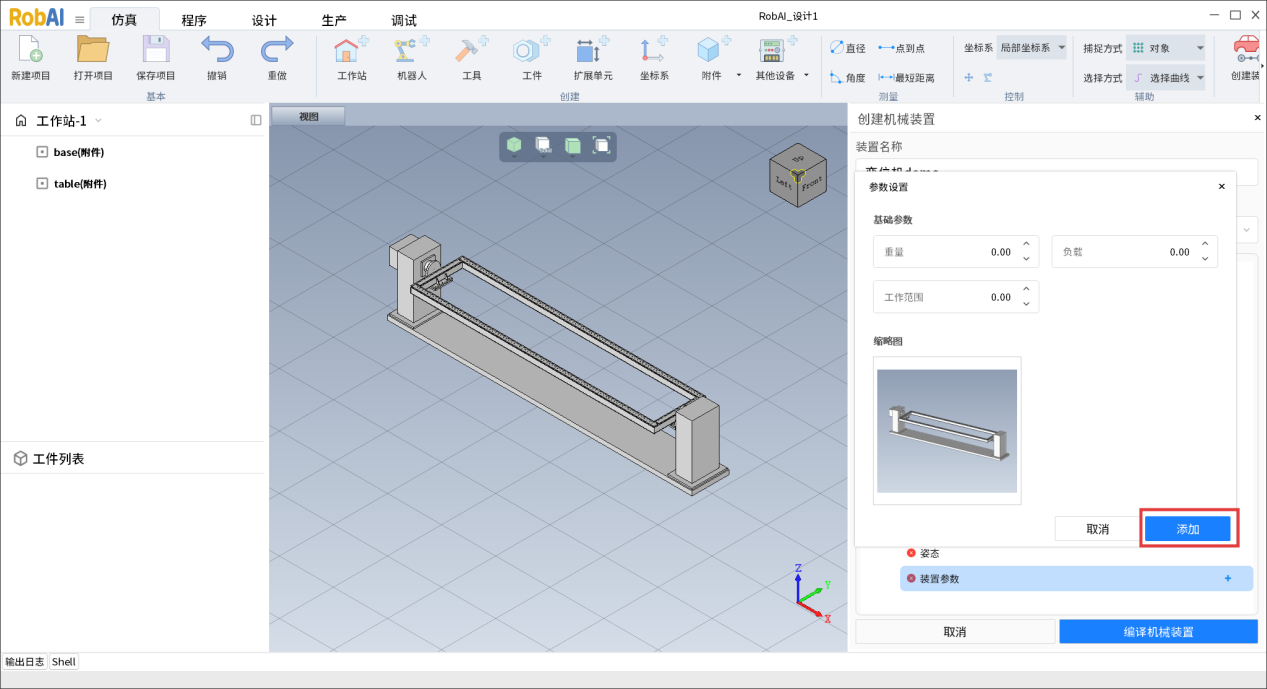
点击缩略图区域的“点击导入缩略图”导入变位机图片
完成后点击“添加”保存参数,添加完成。
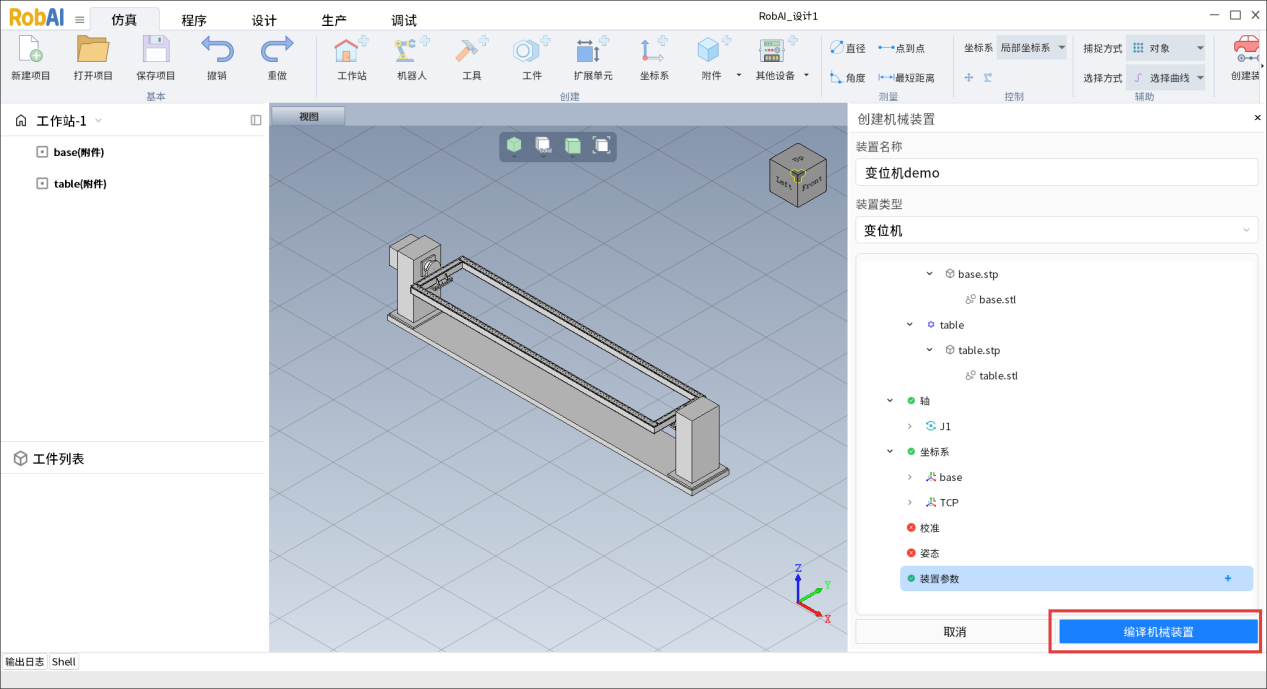
编译并添加
确认所有参数设置完成后,点击“编译机械装置”按钮
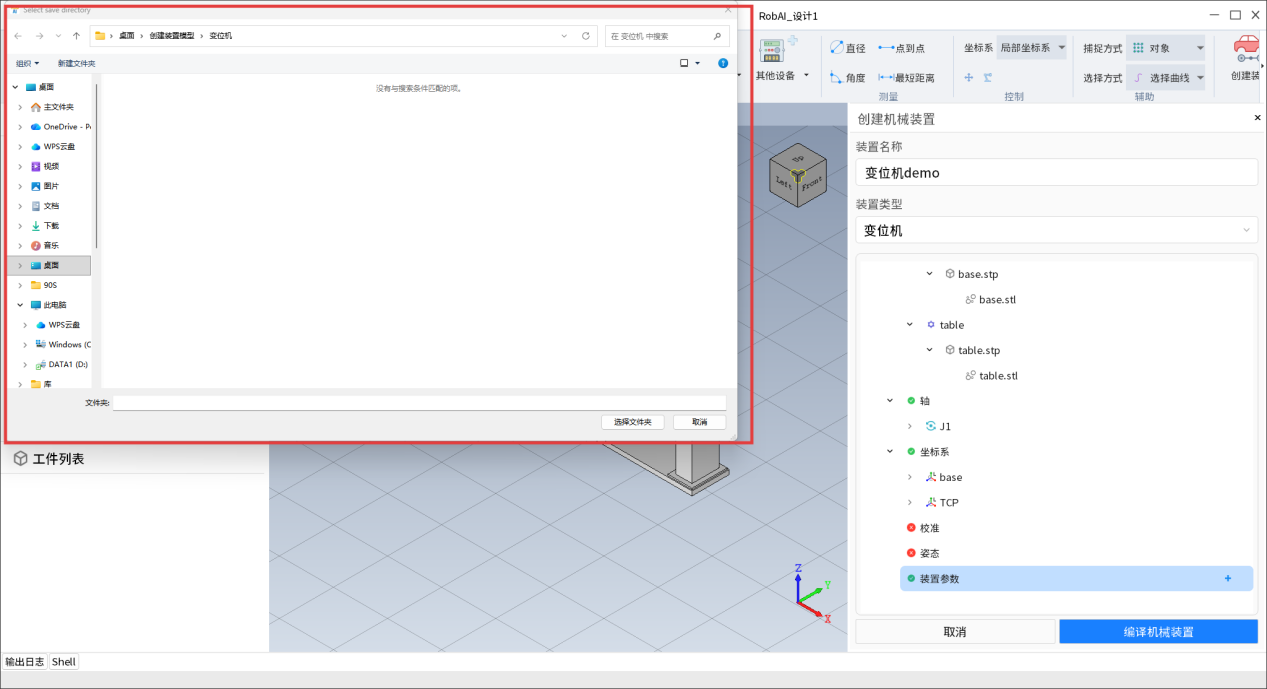
弹出文件夹窗口,选择一个文件夹用于保存变位机。
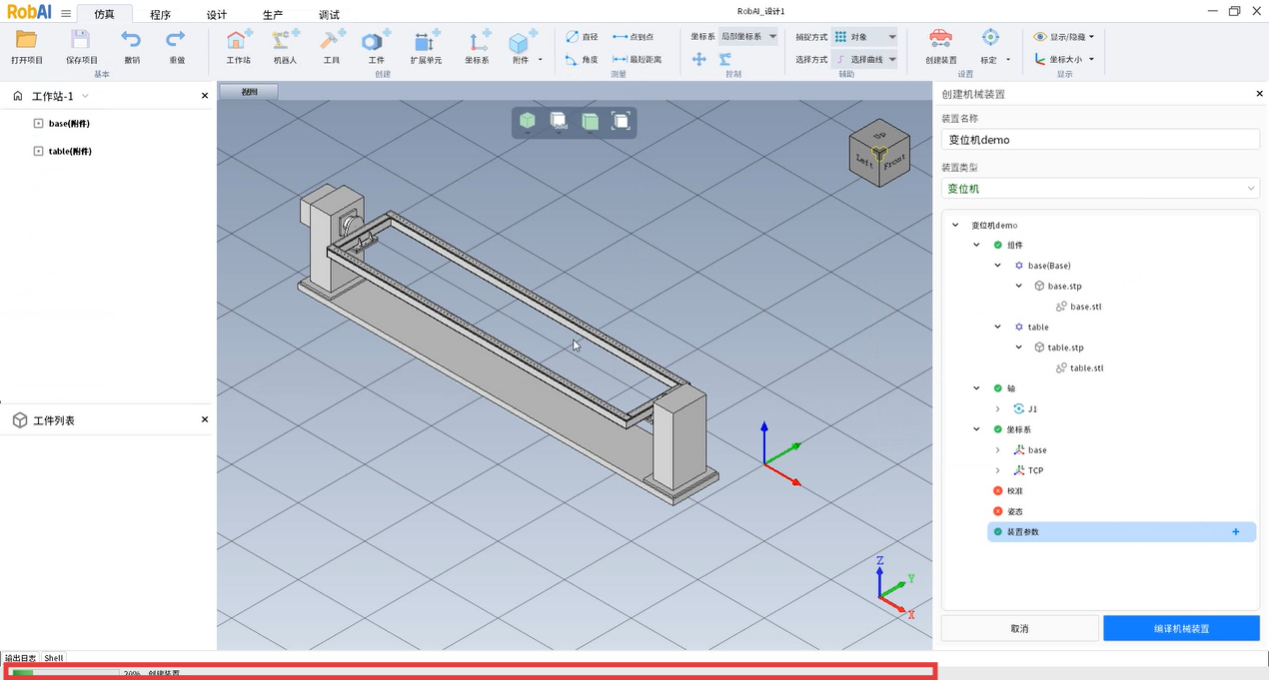
编译中。
编译完成。
出现所创建的变位机demo。
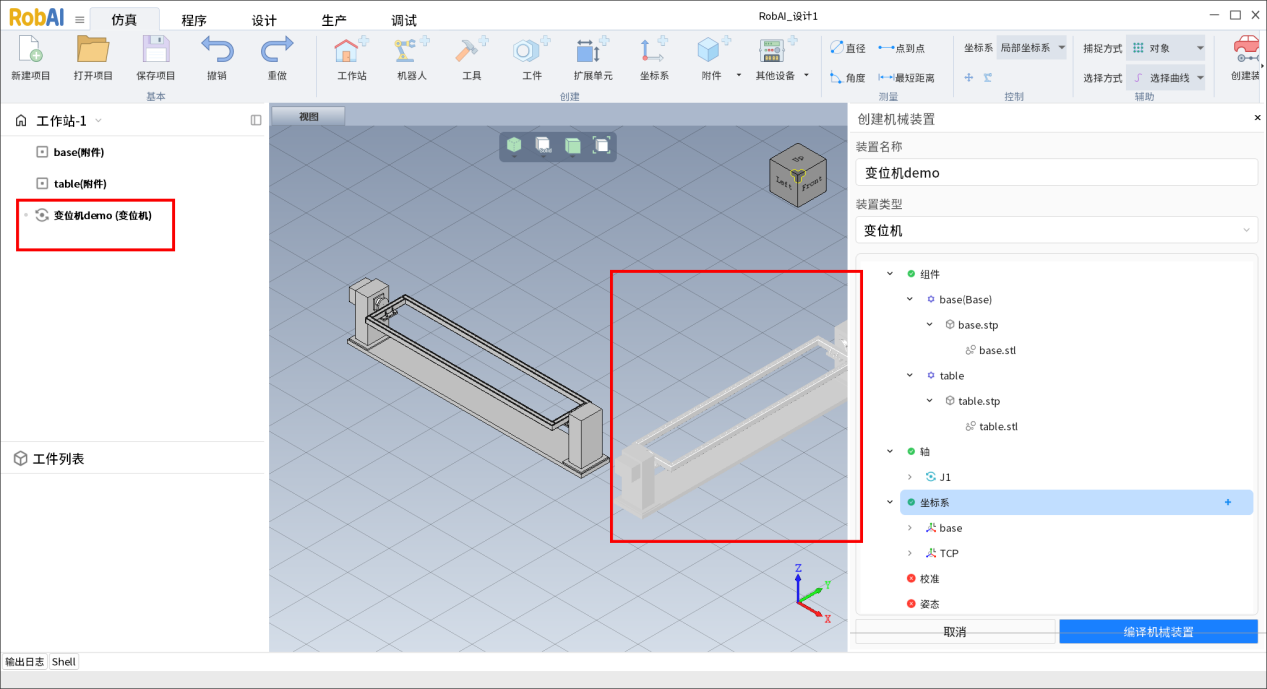
自定义变位机创建成功,可在后续项目中使用。
在新工作站中,选择导入文件的方法添加变位机。
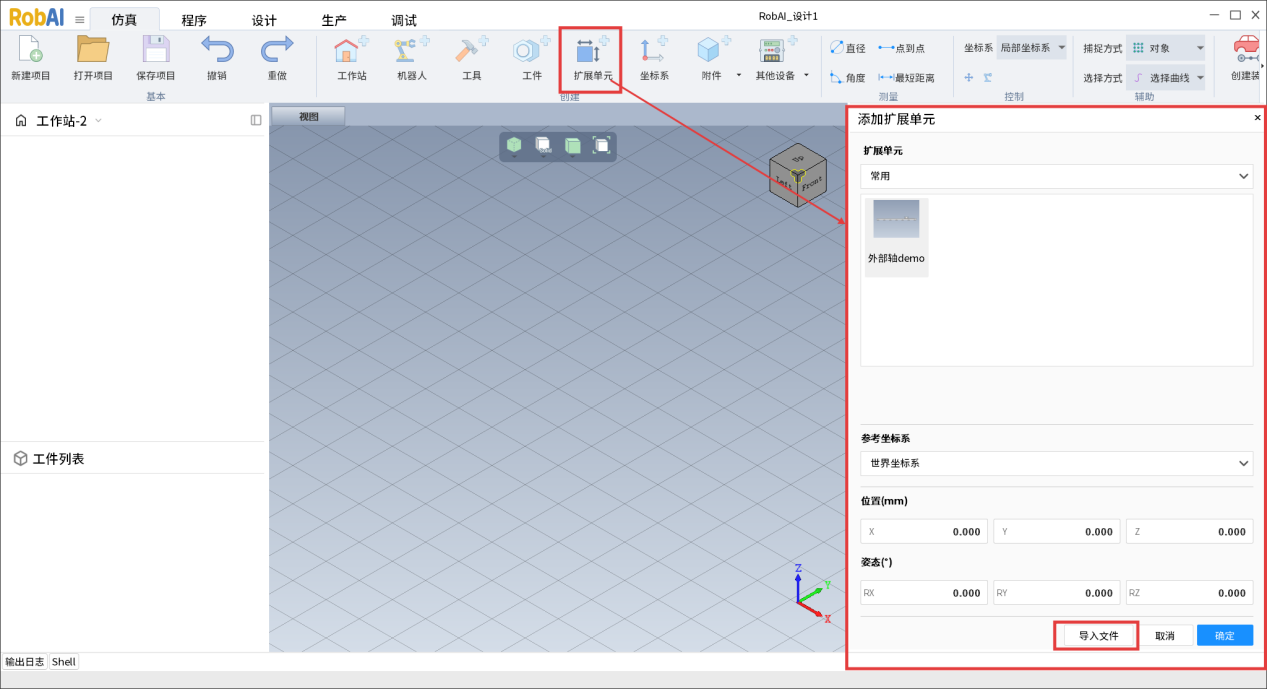
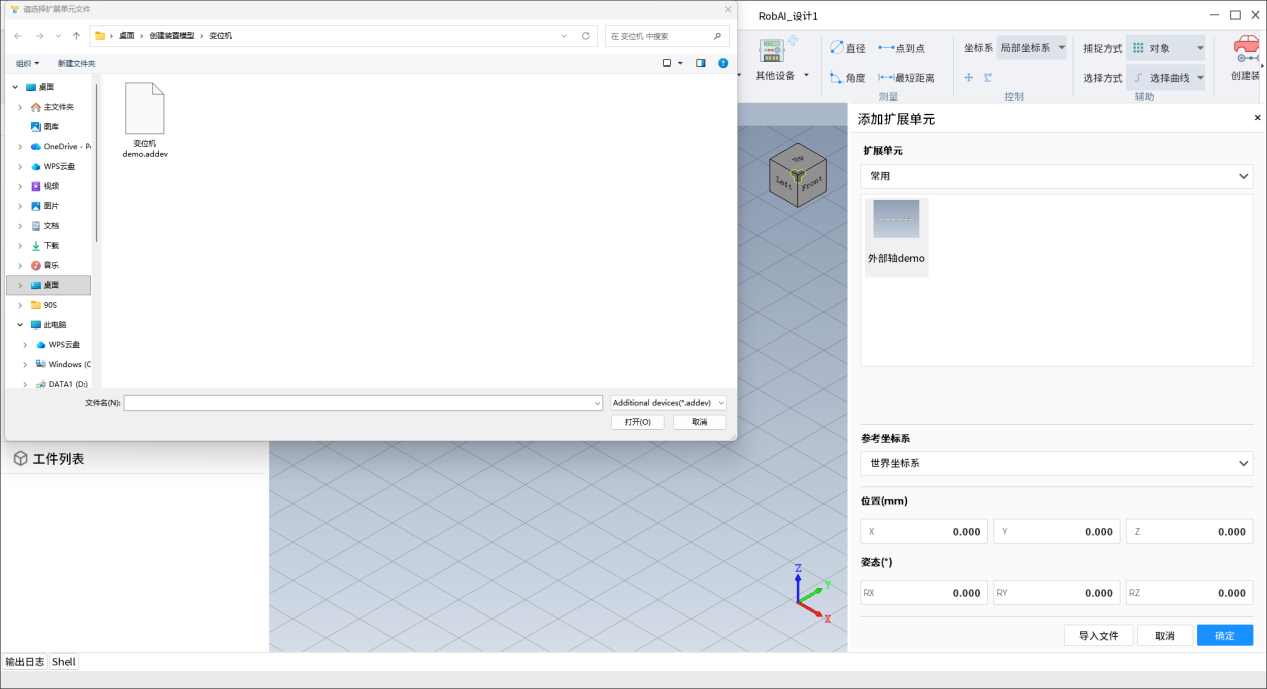
定位到此前保存的目录,选“变位机demo.addev”文件,点击打开完成导入。
导入成功
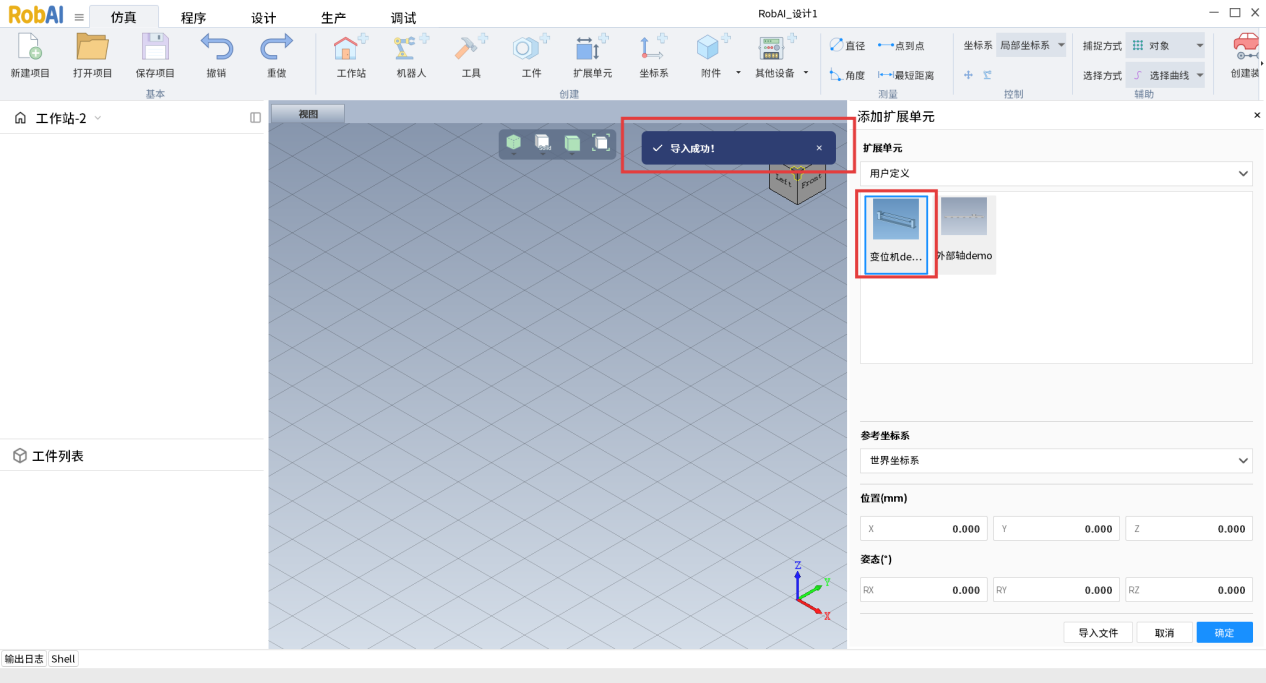
选择变位机demo,点击确定。
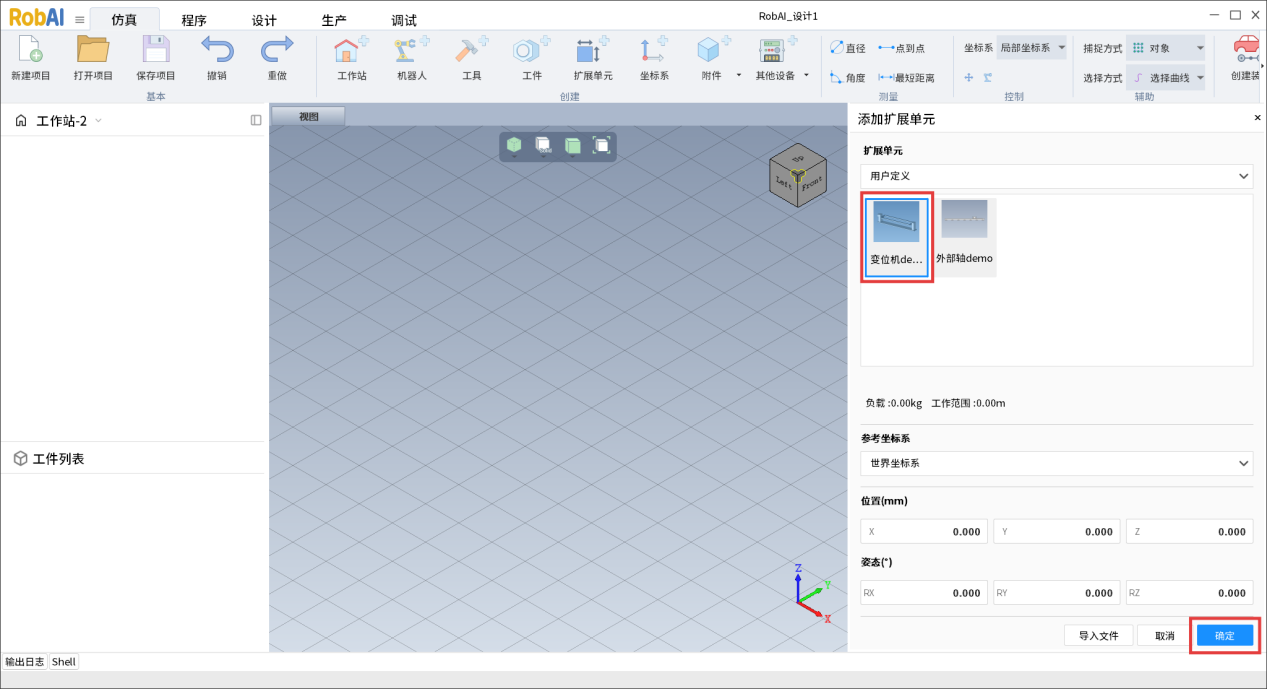
添加成功。
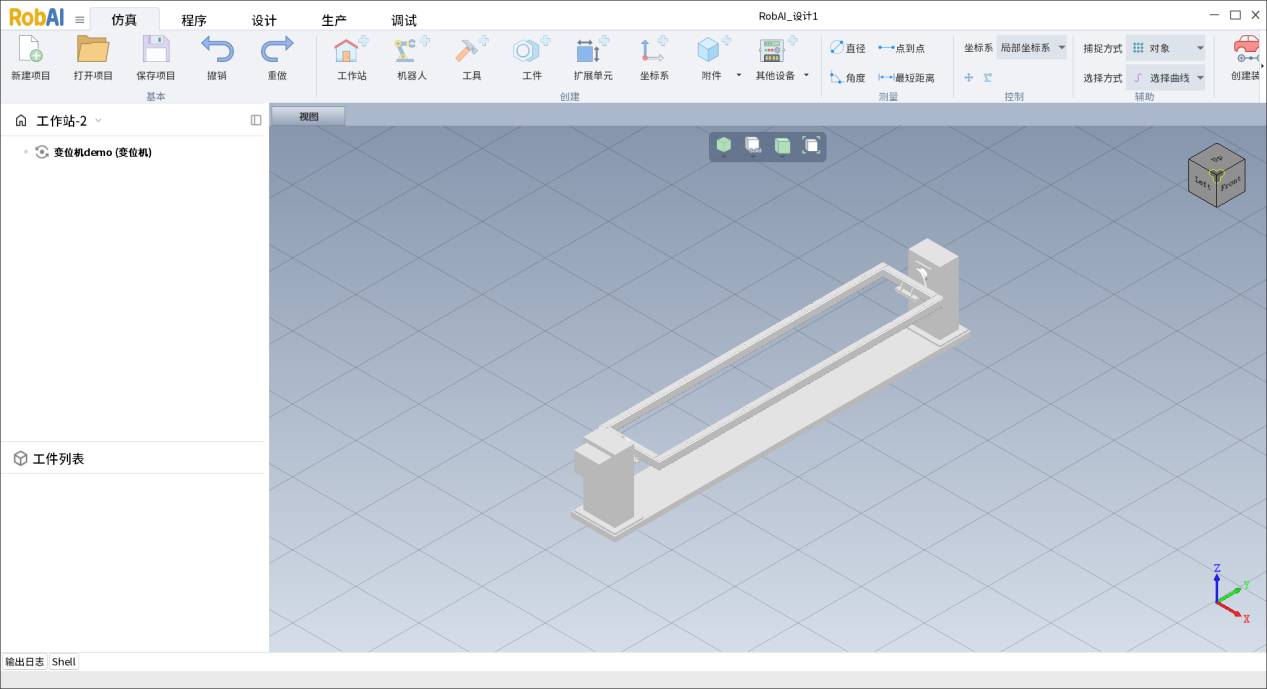
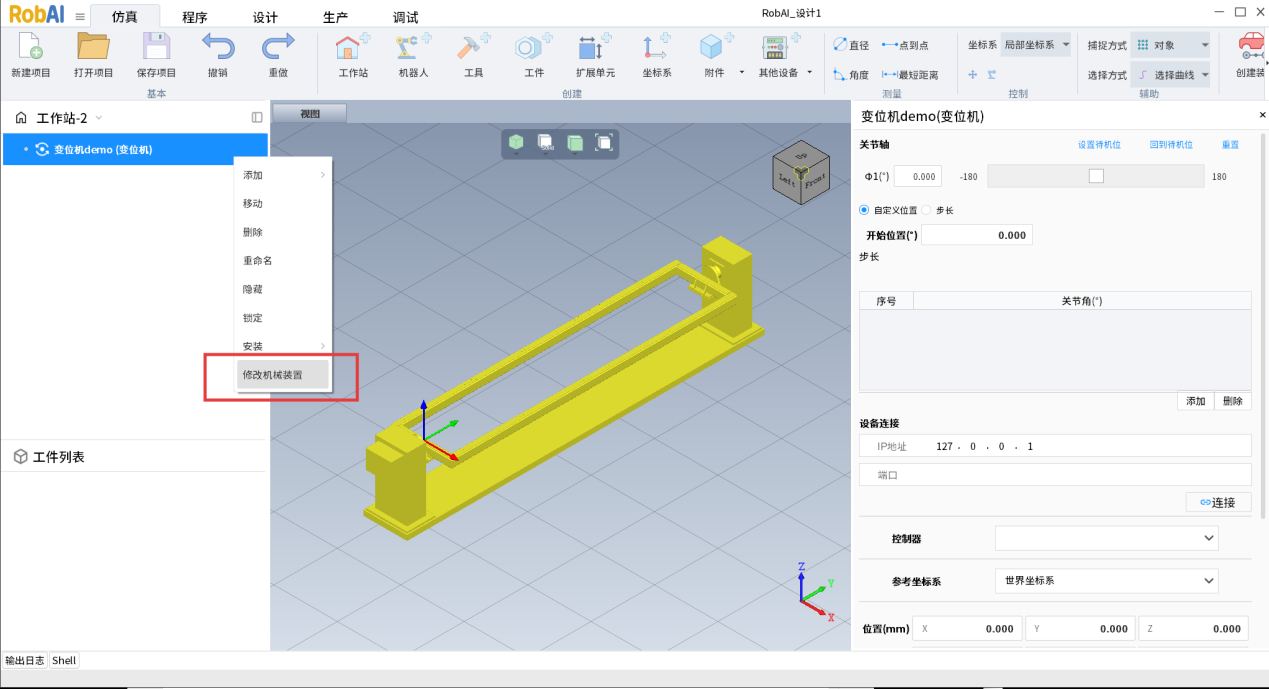
左侧设备树中可修改机械装置