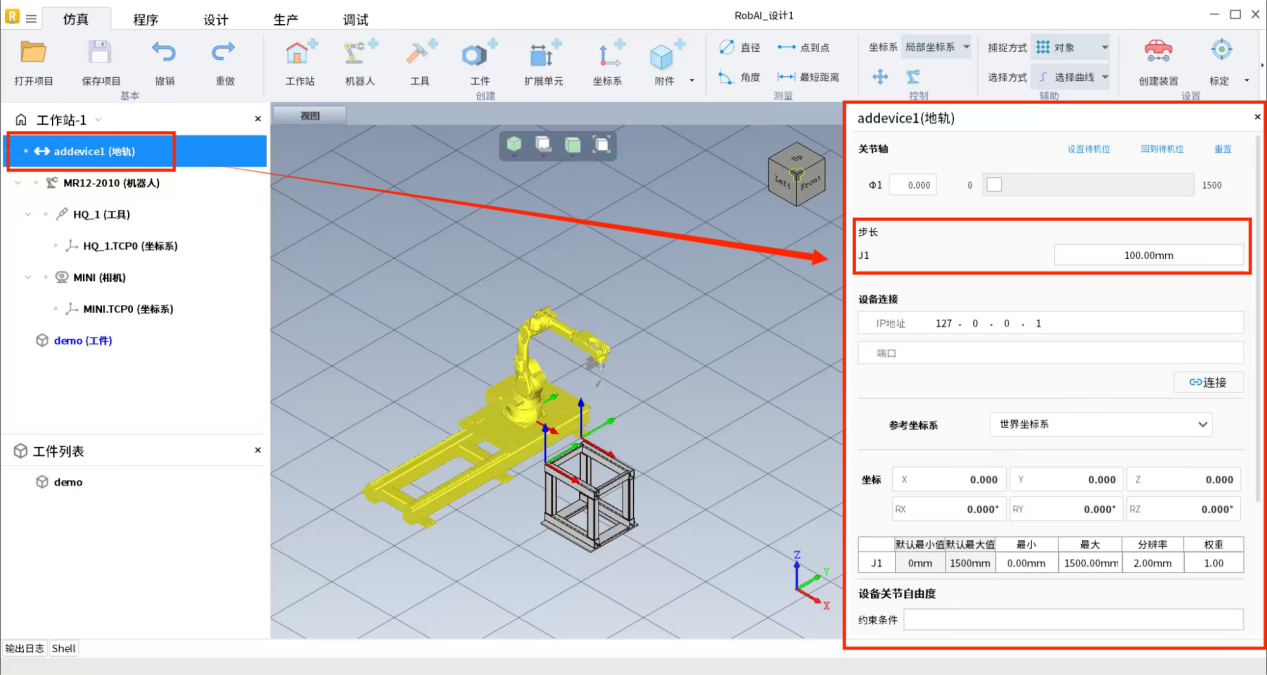
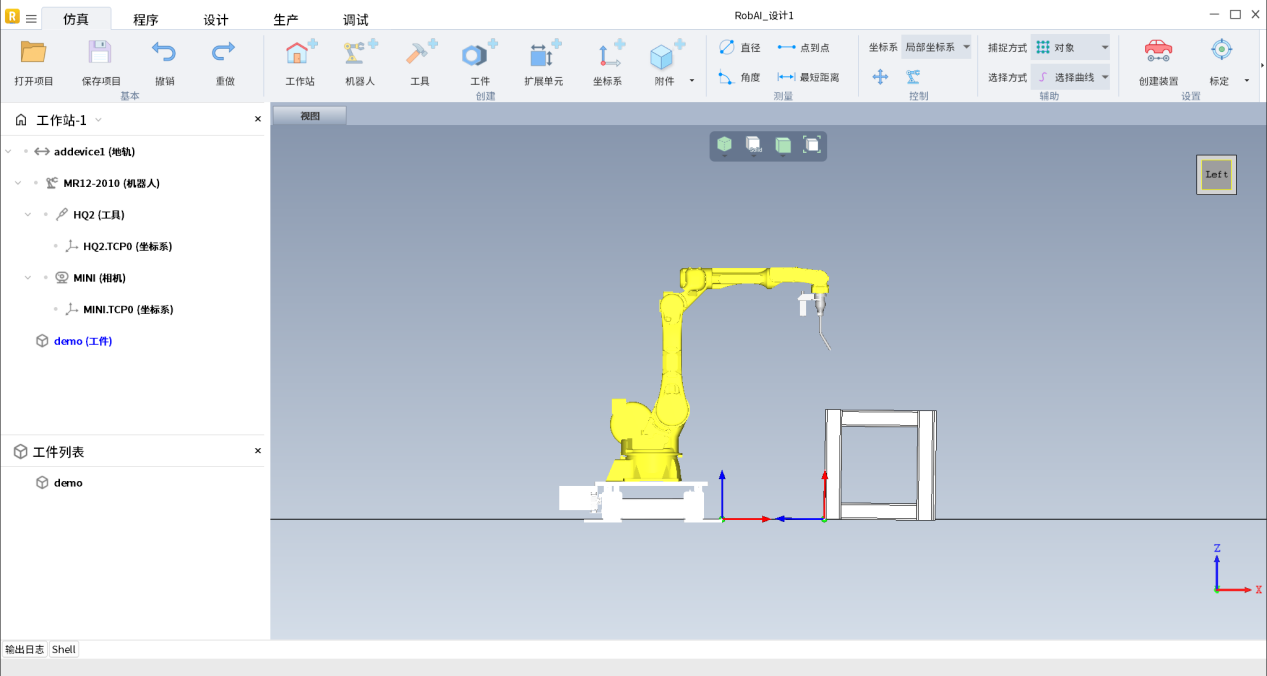
RobAI使用说明二、建站仿真2-2 搭建工站2.2.4设备相关参数设置本页总览2.2.4设备相关参数设置 步长 点击地轨弹出地轨面板,可在面板中设置步长(计算轨迹的时候,地轨的滑块间隔多少mm算一次,一般越大算得越快,越小算得精度越高),此处设置100。 设置焊枪TCP 点击点击右上角视觉立方体(ViewCube)的Left面,显示左视图 左侧设备树点击焊枪Tcp出现其移动手柄 焊枪TCP是用来定义焊枪工作位置和姿态的,移动焊枪TCP蓝色Z轴与焊枪头平行。 移动前 移动后 设置相机TCP 左侧设备树点击焊枪Tcp出现其移动手柄 相机TCP原点一般在相机模型摄像头位置 移动前: 移动后: 移动完成,恢复标准轴侧图如下。
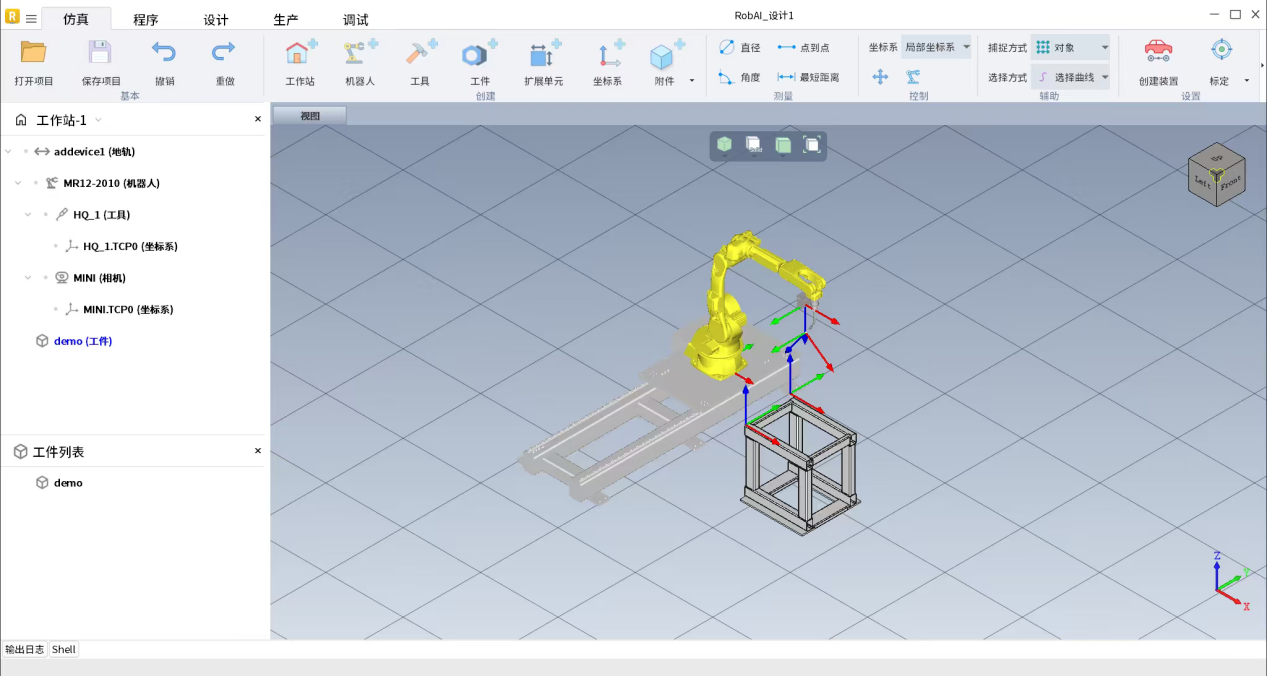
 左侧设备树点击焊枪Tcp出现其移动手柄
左侧设备树点击焊枪Tcp出现其移动手柄
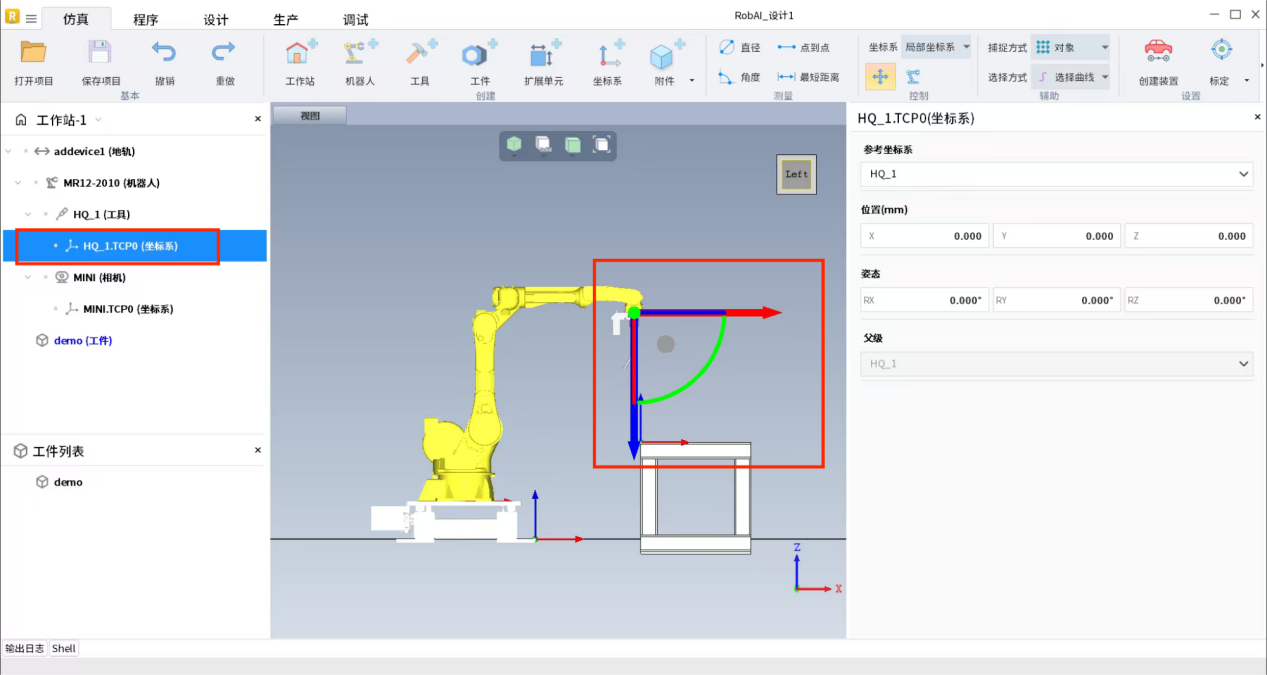 焊枪TCP是用来定义焊枪工作位置和姿态的,移动焊枪TCP蓝色Z轴与焊枪头平行。
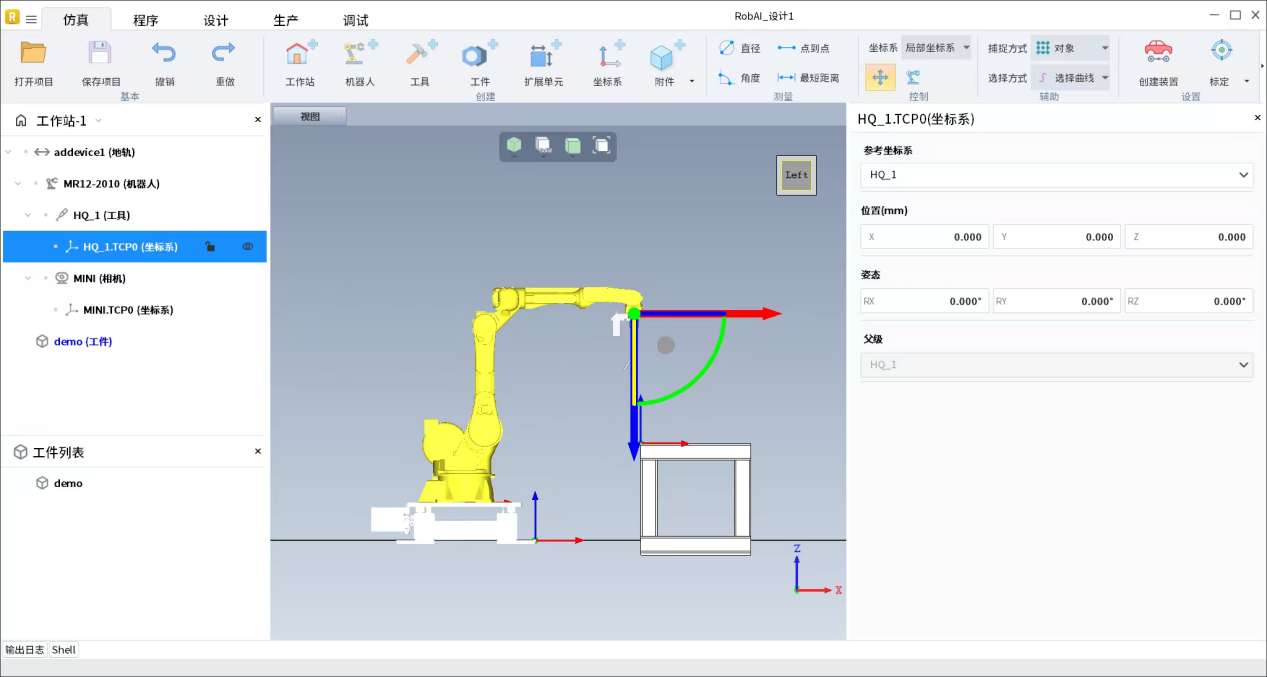
移动前
焊枪TCP是用来定义焊枪工作位置和姿态的,移动焊枪TCP蓝色Z轴与焊枪头平行。
移动前
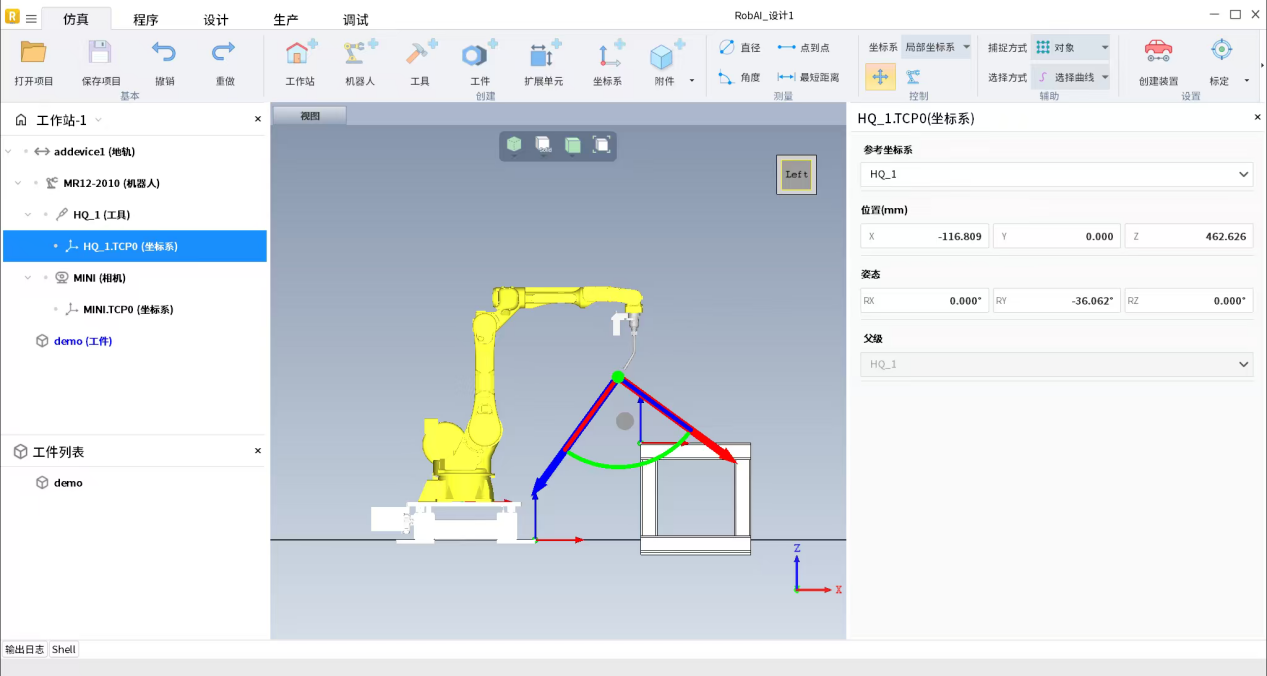
 移动后
移动后
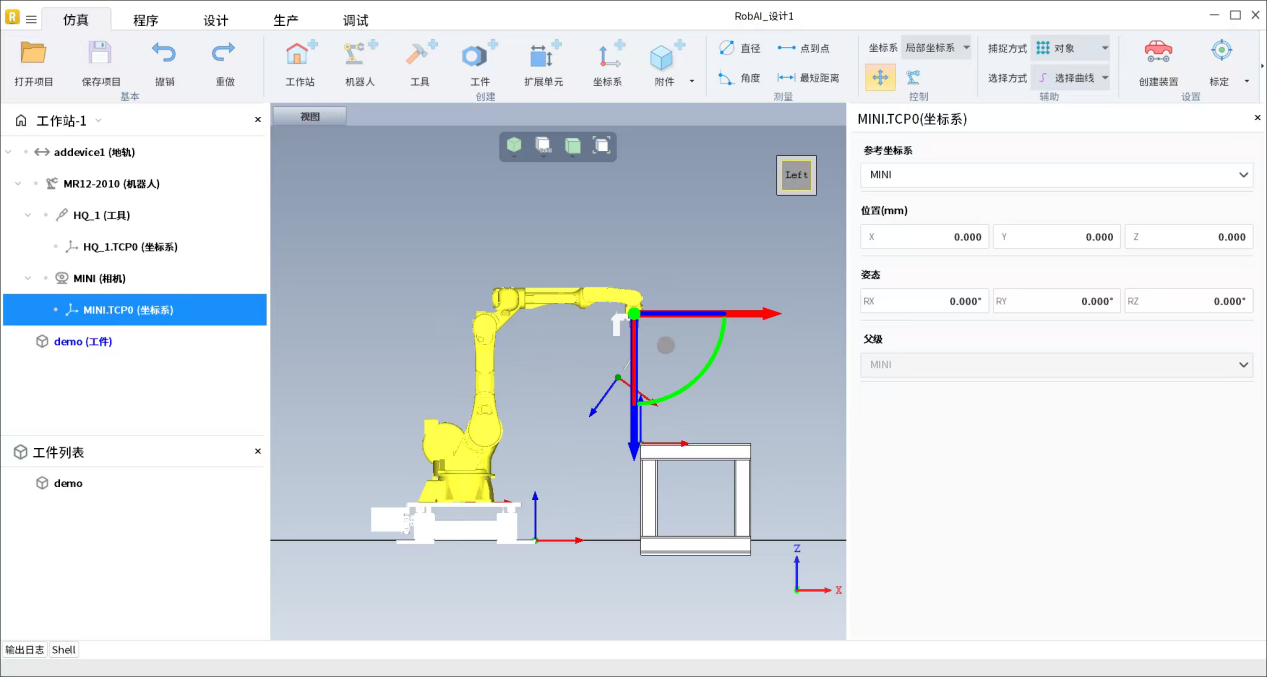
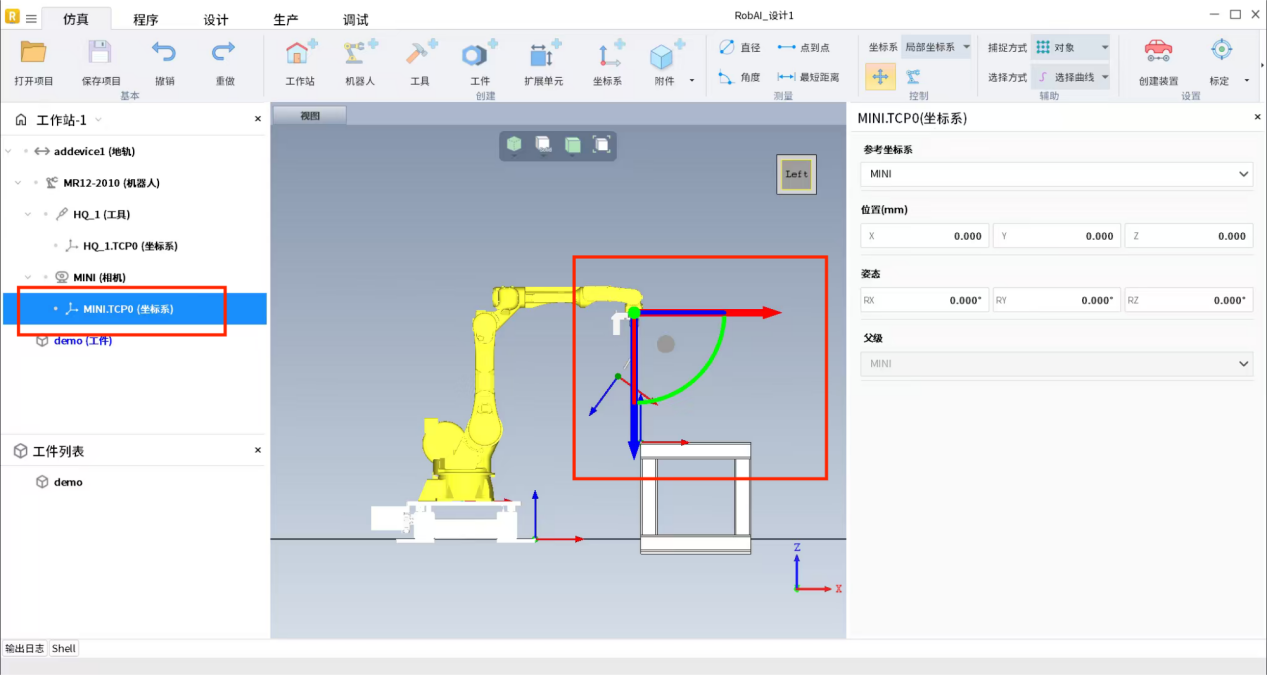 相机TCP原点一般在相机模型摄像头位置
移动前:
相机TCP原点一般在相机模型摄像头位置
移动前:
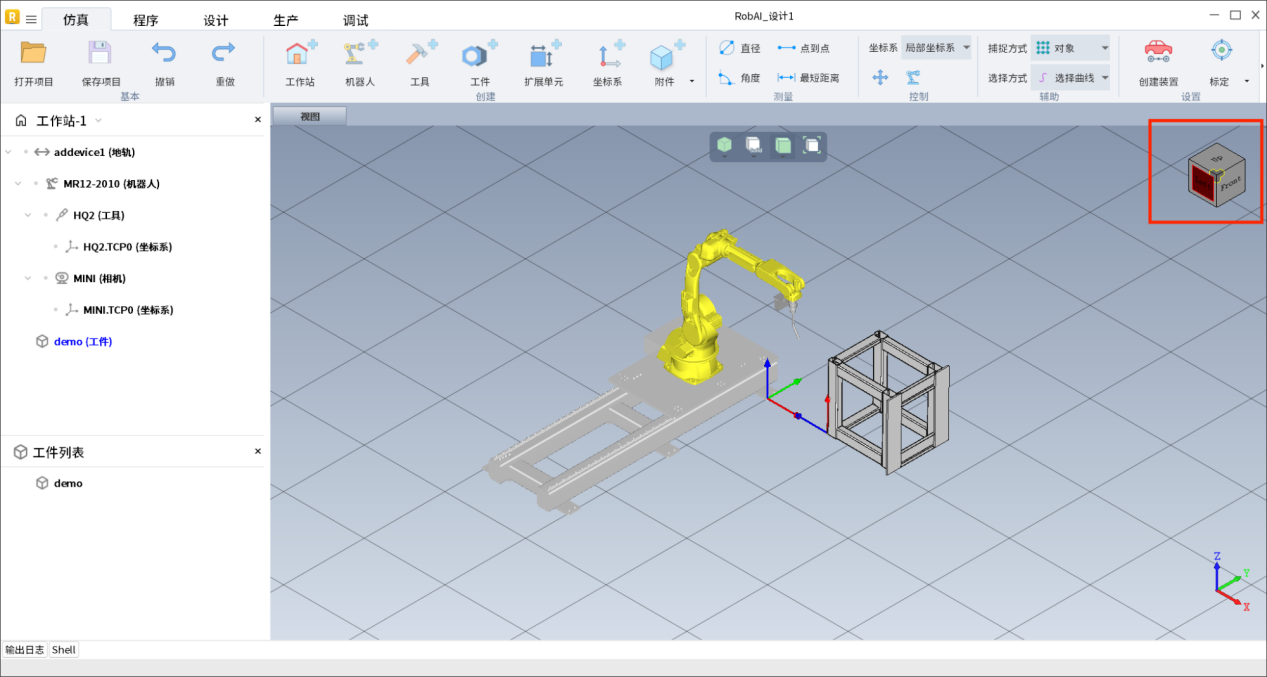
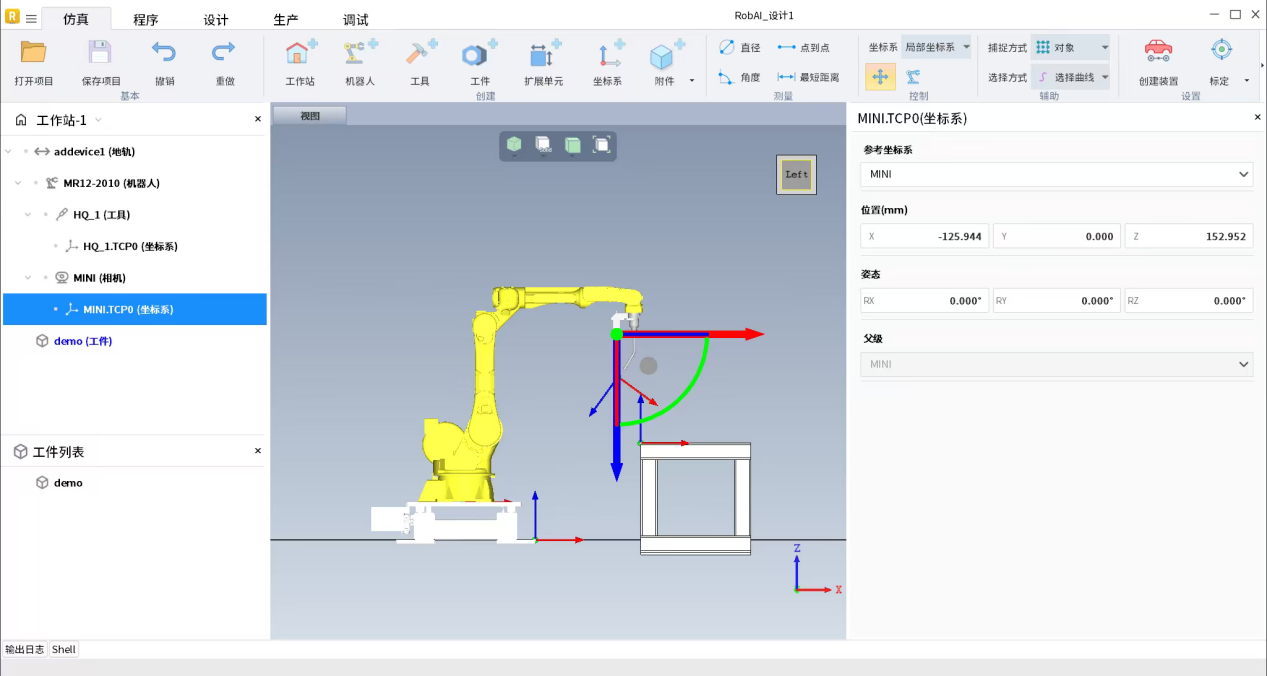 移动完成,恢复标准轴侧图如下。
移动完成,恢复标准轴侧图如下。